 |
|
Inhalt der Vorlesung
Mechatronische Systeme sind heutzutage aus unserem täglichen Leben nicht mehr wegzudenken. Beschleunigungs- und Drehratensensoren in modernen Smartphones oder autonom fahrende Autos sind nur zwei der vielfältigen Beispiele mechatronischer Systeme.
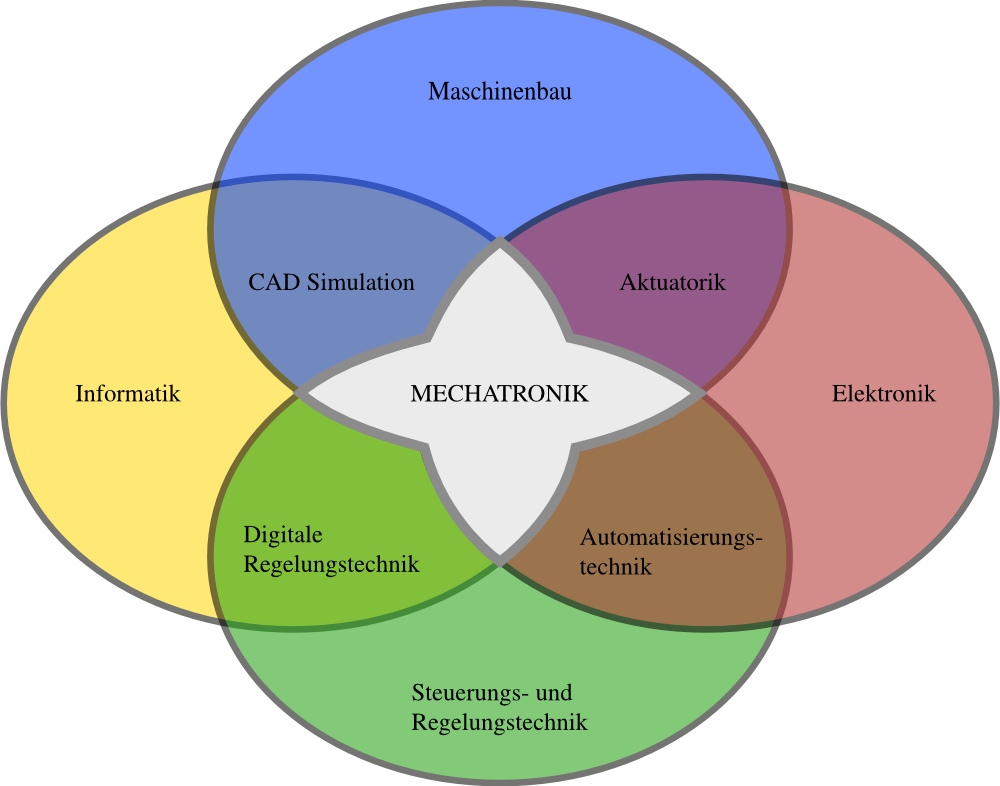
Ein Roboter ist ein typisches mechatronisches System welches Mechanik, Elektronik, Regelungstechnik und Informationsverarbeitung in einem System vereint. Viele Konzepte, wie z. B. das autonome Fahren, basieren auf Konzepten aus der Robotik.
Die Vorlesung startet mit einer Kinematik- und Kinetikanalyse von Robotersystemen. Anschließend werden verschiedene Berechnungsmethoden der inversen Kinematik vorgestellt und die Lagrangeschen Gleichungen zweiter Ordnung werden für die systematische Herleitung der Bewegungsgleichungen verwendet. Es wird ein Überblick zu Systemidentifikation, Verifikation und Validierung, der für die Simulation notwendigen mechanischen und elektrischen Eigenschaften, gegeben. Anschließend lernen wir verschiedene Aktuatoren, Trajektorienplanungsmethoden und Regelungskonzepte von Robotern kennen.
Danach beleuchten wir die notwendige Sensorik und Signaldatenverarbeitung, um Roboter gezielt zu steuern bzw. zu regeln.
Eine Steuerung von Robotern mittels Bildverarbeitung ist gerade bei Servicerobotern oder mehreren miteinander agierenden Robotern von großer Bedeutung. Wir lernen die sogenannte 'Vision Based Robot Control' Methode kennen und sprechen über die Kommunikation miteinander agierender Systeme.
Im letzten Teil der Vorlesung geben wir einen Überblick über optisch-mechanische Systeme, ein weiteres spannendes Themenfeld der Mechatronik. Es wird ein Einblick in OM-Sim, eine am ITM entwickelte Matlab-Toolbox zur Simulation optischer Systeme, gegeben, welche mittels Strahlengangberechnung (engl.: ray tracing) den Einfluss von Starrkörperbewegungen, Deformationen und Spannungen auf optische Abbildungen ermittelt.
Informationen zur Vorlesung
-
Vorlesungstermine:
- Mittwoch 11:30 – 13:00 Uhr, V7.11
- Freitag 08:00 – 09:30 Uhr, V7.11
- erster Termin: Mittwoch, 24.10.2018
- Materialien zur Vorlesung werden in ILIAS zur Verfügung gestellt.
|
|
|
|
