 |
|
Beschreibung
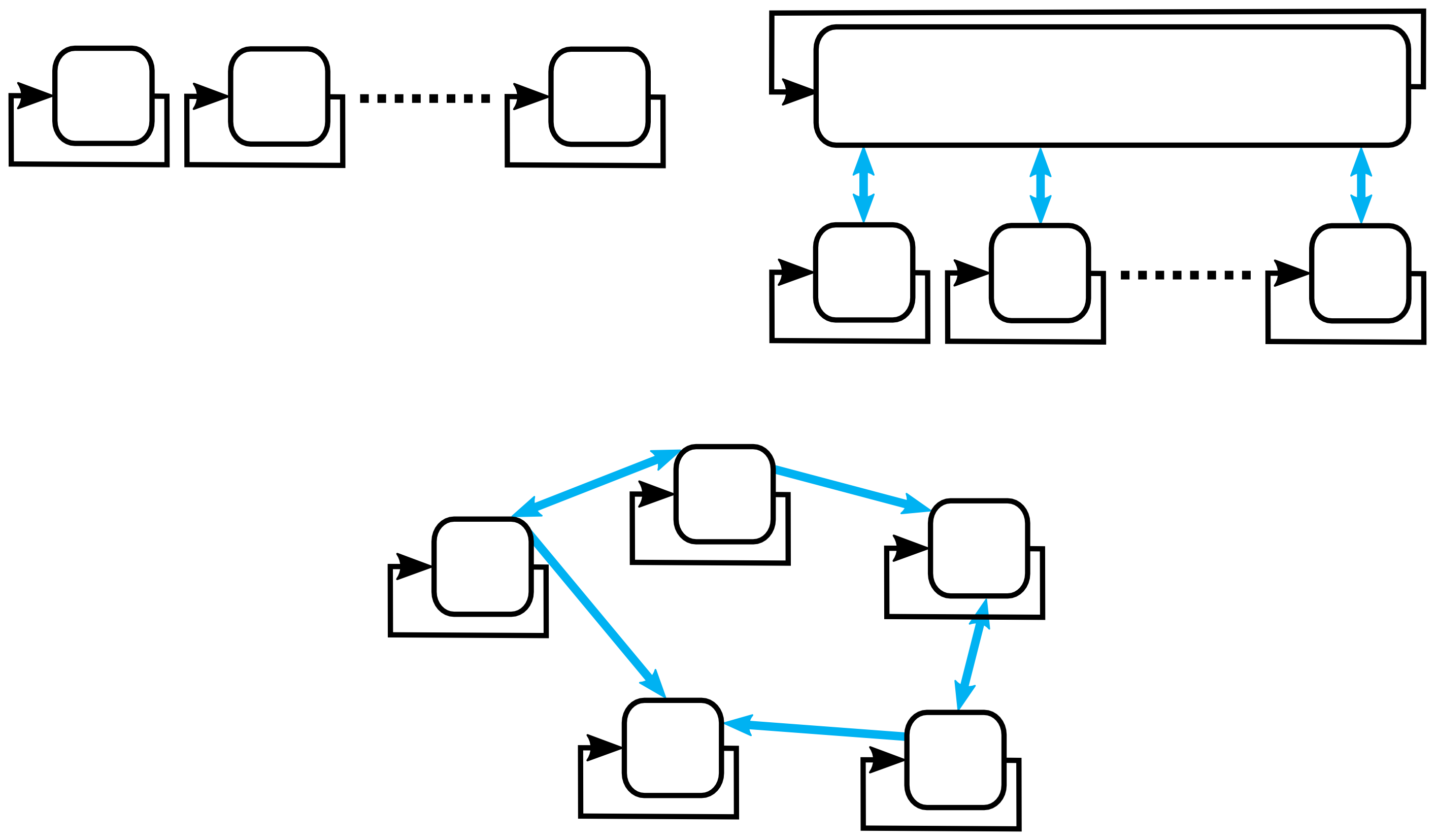
Abb. 1: Regelschemata für unabhängige, hierarchische, und kooperative verteilte Regelung
|
Die Regelung mechanischer Systeme nicht durch einen zentralen Regelalgorithmus, der alle Vorgänge im System dem Regelziel entsprechend steuert,
sondern durch eine Menge eigenständiger, über eine Netzwerkinfrastruktur kommunizierender Regler, bietet etliche mögliche Vorteile.
So kann beispielsweise eine einfache Erweiterbarkeit des Systems ermöglicht werden, indem weitere Systemelemente und Regler dem System hinzugefügt werden,
ohne die Notwendigkeit, einen komplizierten, zentralen Regelalgorithmus neu entwerfen oder auslegen zu müssen. Weiterhin ist es denkbar, dass ein Ausfall einzelner
Regler oder Systemkomponenten durch die im Regelnetzwerk verbleibenden Regler selbstorganisiert kompensiert werden kann, so dass die zugrunde liegende Aufgabenstellung
noch so weit wie möglich erfüllt wird. Andererseits stellen gerade mechanische Systeme, die oftmals eine schnelle Dynamik aufweisen und damit kurze Abtastzeiten erfordern,
große Anforderungen an derartige Regelkonzepte, da dadurch besonders wenig Zeit zur Kommunikation und Berechnung der nächsten Stellsignale zur Verfügung steht.
Die konkreten Anwendungen solcher verteilter Regelkonzepte sind dabei vielfältig. Im Fokus der Forschung des Instituts in diesem Bereich steht die
Lösung komplexer Aufgabenstellungen mit mobilen, weitestgehend autonom agierenden Robotern. Dies gilt im Besonderen für Gruppen derartiger mobiler Roboter die, ausreichende
Kommunikationsmöglichkeiten vorausgesetzt, ihre Aufgabenstellungen kooperativ lösen. Durch den technischen Fortschritt hinsichtlich mobil verfügbarer Rechenleistung, der
Verfügbarkeit von günstigen und leistungsfähigen Sensoren und standardisierten kabellosen Kommunikationsmethoden wird hierbei der Bereich des Machbaren kontinuierlich größer.
Im aktuellen Forschungsinteresse ist so beispielsweise der kooperative Objekttransport durch eine selbstorganisierte Gruppe von mobilen Robotern. Eine erfolgreiche Aufgabenlösung erfordert dabei,
neben Gesichtspunkten der rein technischen Umsetzung, die Auseinandersetzung mit modernen regelungstheoretischen Konzepten wie beispielsweise Distributed Model Predictive Control oder
Methoden auf Basis algebraischer Graphentheorie.

Abb. 2: Hardware-Experiment mit mobilen Robotern und Distributed Model Predictive Control
|
|
|
Vid. 1: Hardware-Experiment zum kooperativen Objekttransport, durchgeführt in Zusammenarbeit mit und am Laboratory of Robotics and Multibody System an der Tongji Universität in Shanghai.
|
Ansprechpartner
|
|
