Institute of Engineering and Computational Mechanics
Integrated Optimization of Controlled Elastic Multibody Systems
Project Description
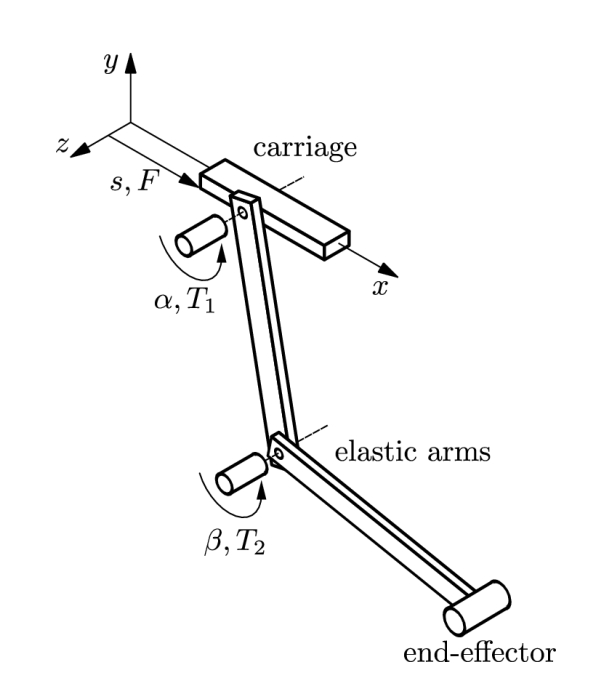
Example of an underactuated elastic multibody system
Traditional machine designs, such as in industrial robots or machine tools, are based on maximized stiffness to suppress undesired elastic vibrations. Thus, as a result high accuracy can be achieved. However this approach usually includes a drastic mass increase, a poor weight-topayload ratio and high energy consumption. In contrast, modern light weight design results in low moving masses, low energy consumption and allows high speeds. However, undesired vibrations occur due to the body's flexibility.
In order to represent the large non-linear working motion and the small undesired elastic vibrations in a simulation, the system must be modelled as an elastic multibody system. The control of such elastic multibody systems often requires the use of modern nonlinear control techniques. In the application of these control techniques to elastic multibody systems the mechanical design is in most cases assumed to be fixed and the control is used to overcome the shortcomings resulting from the given mechanical design.
In this project an integrated optimization approach for controlled elastic multibody systems should be developed. In this optimization the mechanical design and control design are considered jointly. Thus the control is not only optimally adapted to the flexible multibody system, but also the elastic multibody system is designed in such a way that it ideally supports the control system. Thus the performance of the overall system becomes optimal. Possible design parameters in this optimization approach could be mass and stiffness distribution, body shape, location of additional actors and sensors and control parameters. In the future this integrated optimization approach should form the basis of optimal design of modern working machines which are characterized by high versatility, speed, accuracy and low energy consumption.