Project Description
|
|
Development Process
|
|
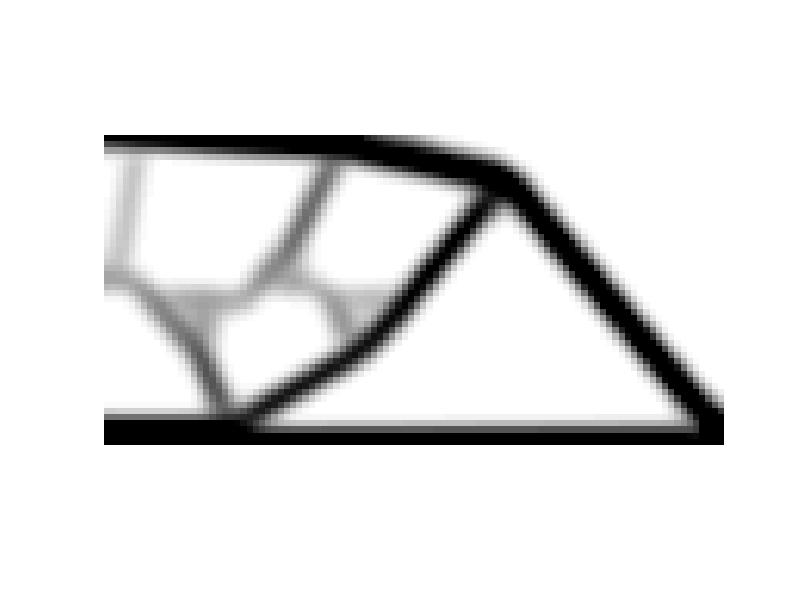
Topology Optimization of Mechanical Finite-Element-Structures
(siehe http://www.toptopt.dtu.dk)
|
|
|
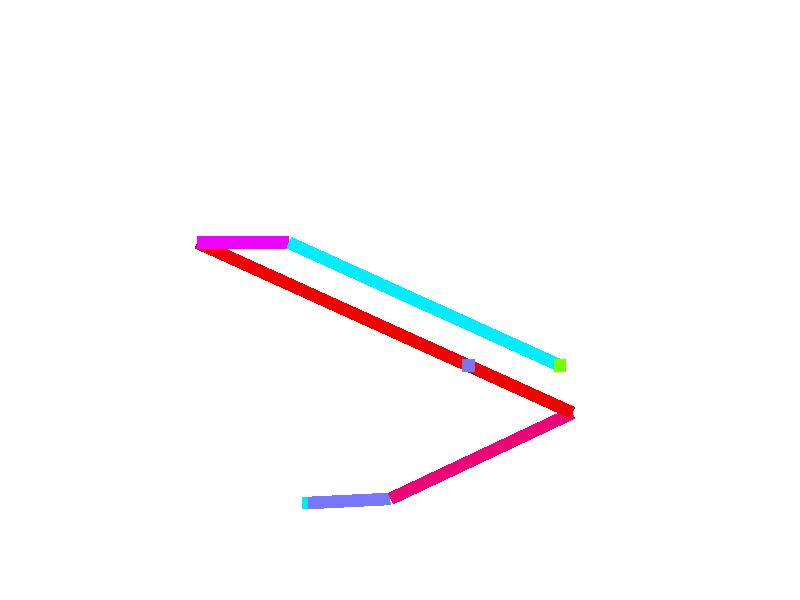
Topology Optimization of Rigid Body Mechanisms
|
start animation (1 MB)
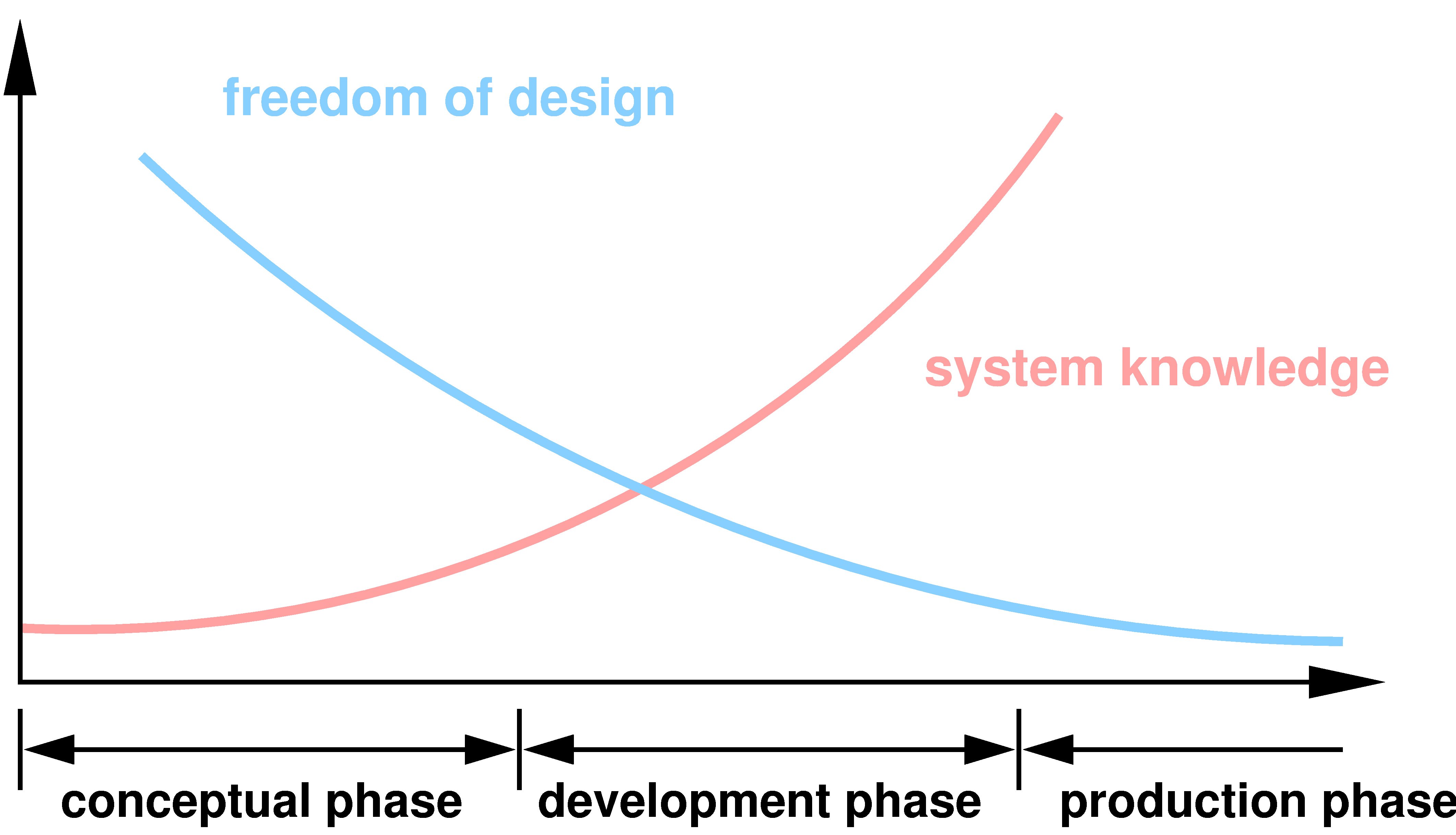
The development process of mechanical systems starts with the definition of the its basic construction and functionality. Thereby the resulting design is based on experience, intuition and knowledge. Methods for system optimization are employed subsequently in the development stage. As a consequence, sub-optimal design concepts are not improved by optimization procedures and result in sub-optimal system behavior. Considering the relationship between the freedom of design and the system knowledge, it is recommended to provide approaches which tackle the optimization already in the design phase in order to save time and money.
Unlike shape optimization and sizing problems the topology optimization supports the development process as early as the conceptual phase and is therefore to be understood as a development tool.
Thereby the synthesis of mechanical systems which is traditionally based on experience, intuition and knowledge is facilitated by optimization appproaches.
The goal of the topology optimization is to generate feasible optimal designs and expand the system knowledge as early as possible.
The topology optimization of mechanical structures has changed dramatically in recent years and is now employed in many industrial applications (FE design, OptiStruct). The method is based on the finite element method. In a reference domain a limited amount of material is optimally distributed with respect to an objective function, which usually refers to the structural properties of the mechanical system. Although approaches for the optimal synthesis of mechanisms exit, the macroscopic motions are based on the deformation of the structures. Hence, large nonlinear motions cannot be described.
The aim of this work is to develop and test different topology optimization approaches for multibody systems. In a first step, the possibilities of optimal mechanism synthesis are examined. An example of this is to minimize the deviation of the trajectory of an end-effector of a desired trajectory (animation). Based on this, the procedure shall be expanded for the purely kinematic topology optimization for kinetic problems.
|
