Simulation von komplexen mechatronischen Systemen erfordert die Modellbildung der einzelnen
Komponenten, die von verschiedenen Ingenieursdisziplinen stammen, z.B. Mechanik,
Regelungstechnik und Elektronik. Das Gesamtsystem kann in einzelne, den Ingenieursdisziplinen
entsprechende Module zerlegt werden. Die Simulation des Gesamtsystems wird realisiert durch
einen zeitdiskreten Organisator, der die einzelnen Module über Ein- und Ausgangsgrössen
verknüpft und die Kommunikation zwischen ihnen zu diskreten Zeitschritten sicherstellt.
Die Eingangs-Ausgangsbeschreibung erlaubt die dynamische Analyse eines Systems, ohne die internen
Strukturen dieses Systems zu kennen, woraus die sogenannte ``black-box'' Beschreibung resultiert.
Da die interne Struktur eines Blockes unabhängig ist von der Struktur des Gesamtsystems, ist
mit diesem Ansatz die Wiederverwendbarkeit und Austauschbarkeit einzelner Modulen gewährleistet.
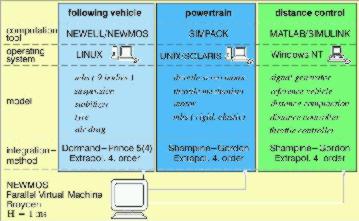
Durch die modulare Beschreibung lassen sich ebenfalls die einzelnen Module unabhängig voneinander
modellieren. Die anschliessende Kopplung der Module zu einem Gesamtsystem erlaubt es, einzelne Komponenten
auf verschiedenen Rechnern mit unterschiedlicher Software berechnen zu lassen. Obwohl Standardsolver eingesetzt
werden können, treten durch die Kopplung numerische Probleme auf. Es kann gezeigt werden, dass bei
der nicht-iterativen Simulatorkopplung die Nullstabilität nur dann garantiert werden kann, falls
keine algebraischen Schleifen innerhalb des Gesamtsystems auftreten. Eine iterative Methode der
Simulatorkopplung eröffnet einen systematischen Ansatz, um Simulationswerkzeuge zu koppeln.
Publikationen
Kübler, Ralf:
Modulare Modellierung und Simulation mechatronischer Systeme,
Fortschritt-Berichte VDI, Reihe 20, Nr. 327. Düsseldorf: VDI, 2000.
Rükgauer, Andreas:
Modulare Simulation mechatronischer Systeme mit Anwendung in der Fahrzeugdynamik,
Fortschritt-Berichte VDI, Reihe 20, Nr. 248. Düsseldorf: VDI, 1997.