 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Project Description
Motorcycles are physically instable systems. As such, they present chassis engineers with a signifficant challenge, further accentouated by the ever increasing horsepower to weight ratios and motorsport advances. One of these challenges, is the simulation techniques. In this area concentrates the research objective of this project. Main aspects are:
The Driver Model is an attempt to replicate the human behaviour in sportsbike riding, taking into account the way an experienced rider acts (using the whole track width targeting for the apex, moving his upper body to reduce roll and pitch movement, etc) intstead of a controller and a predefined trajectory.
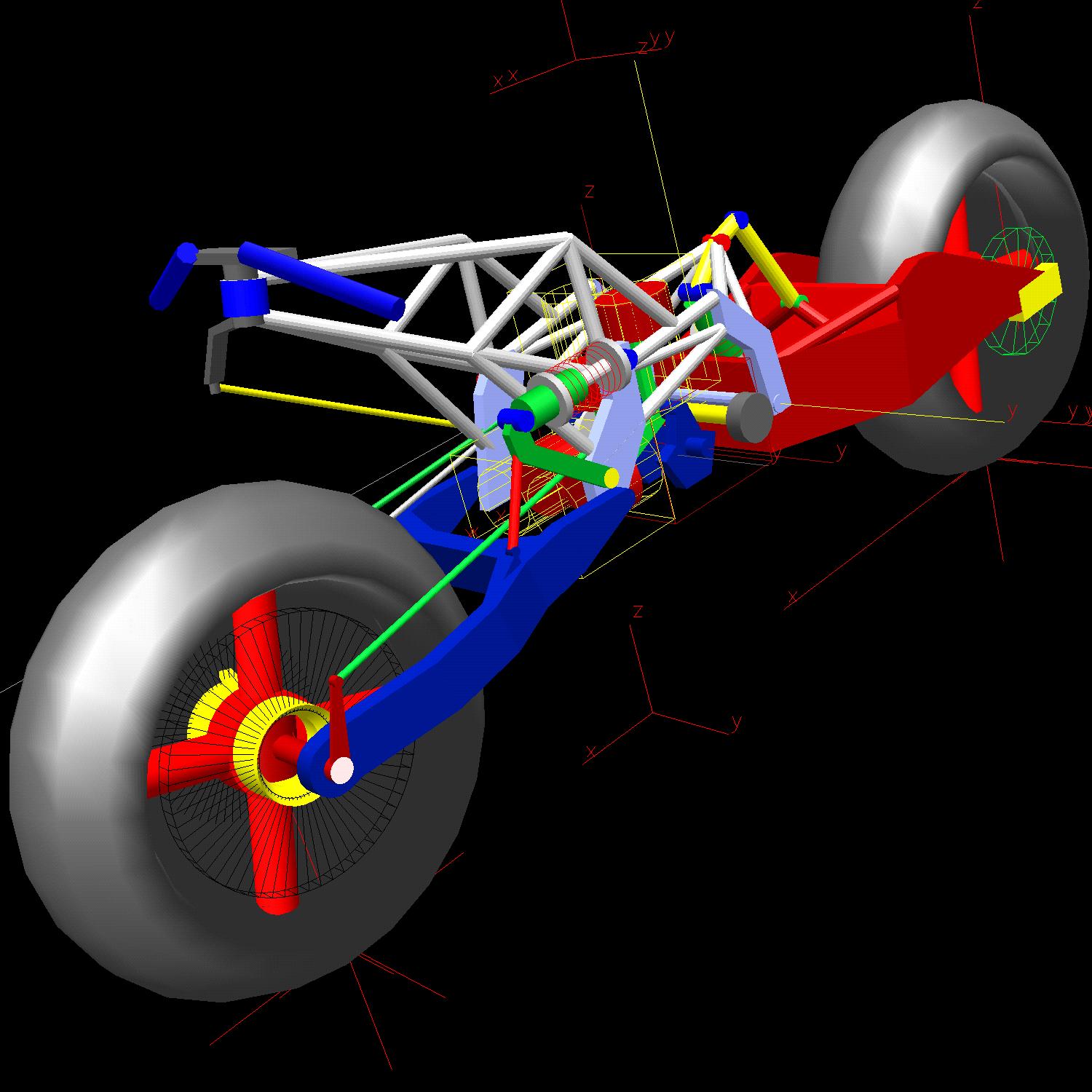
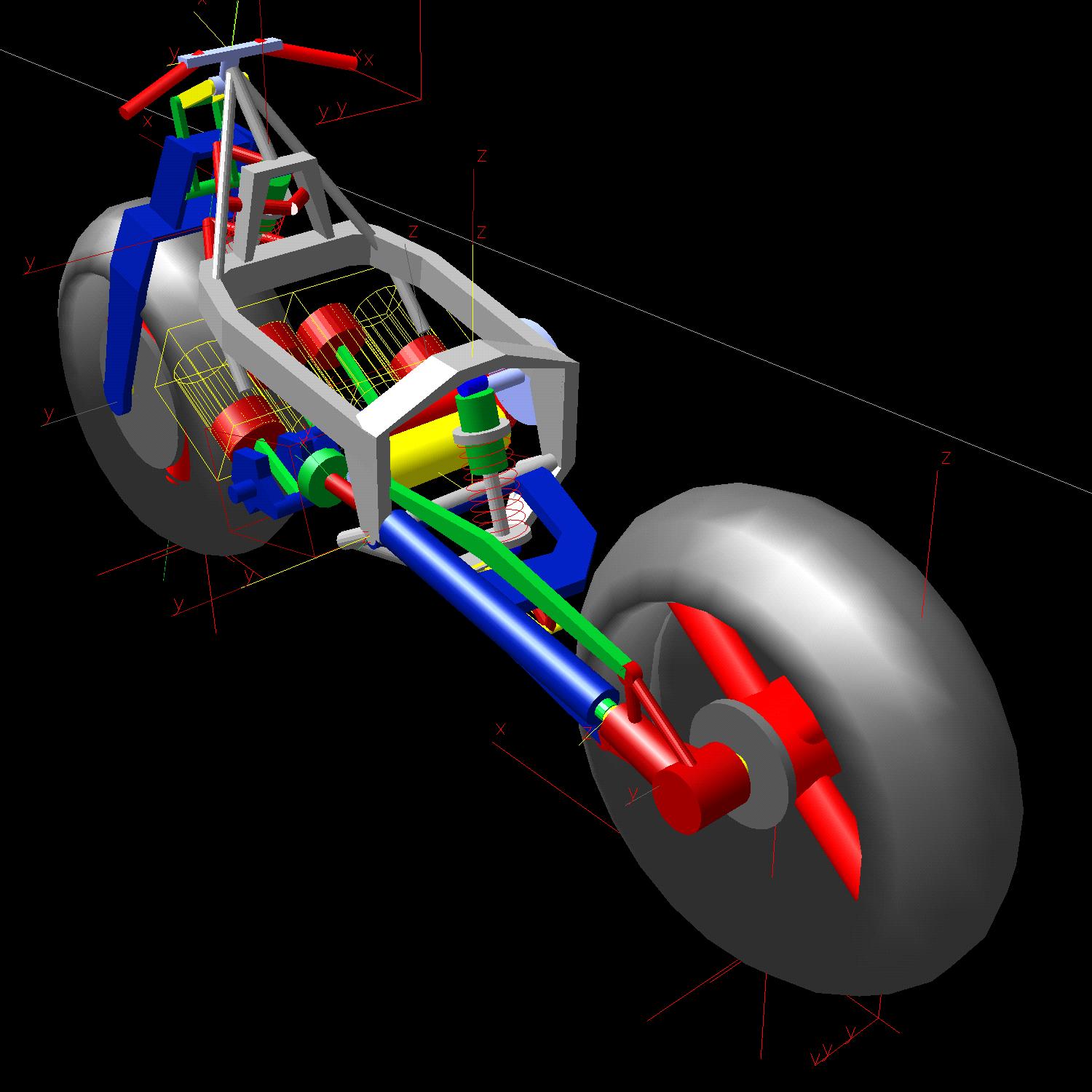
The Bike-Models are detailed to allow testing various design approaches in motorcycle's chassis engineering. Thus, a signifficant part of the research, consists of simulating alternative front suspensions.
The Tyres are also a very signifficant factor, we consider though, that the state of the art in tyre simulations is quite satisfactory. Consequently, established tyre models can be used without reservations.
The long term goal of this research project, apart from thorough understanding of motorcycle dynamic qualities, is the development of a trully radical motorcycle concept, boasting active chassis and aerodynamics. Indeed, if the lateral acceleration limits set by tyre technology are to be further pushed, it can only be achieved by application of aerodynamic downforce. Total chassis control, such as active steering and eigenmode absorbtion is the other aspect of this innovative project.
Following are 4 videos animating the transient response simulations of a bike equipped with a CMG stabilizer and the respective standard bike on two critical situations: a) strong crosswind while moving in a straight line at 200 kph and b) mid-bend bumper while tackling a left-hand corner at lateral acceleration close to 1g. In both cases the gyros absorb the impact of the respective delta and sinusoidal function type disturbances and the driver is left to re-position the bike on the desired trajectory.
View more simulations
Contact |
| Last modified
15.11.2012 ( |