 |
|
Project Description
Apart from motorcycles, I have a deep affection for racing cars. The purest form of racing (albeit limitations are still -unfortunately- present) is formula racing. Bearing a vague resemblance to production cars, single seaters or racing prototypes are the "Holly Grail" for every vehicle-dynamics engineer.
Sadly, numerous limiting factors to an engineer's creativity and the vehicle's final performance still exist:
Formula regulations
racing companies' conservatism
Newton's Laws...
It is the engineer's duty to overcome these factors. The ability to properly understand (or "misunderstand"...) the regulations is of great importance. Such cases are the "hidden" control systems, slight deviations from the dictated parameters, etc
The inflexibility or conservatism is relatively limited in Motorsport, albeit still present. It is a hard-to-overcome difficulty but a convincing performance of the proposed solution can be very persuasive.
This third factor stands for the greatest challenge to an engineer. How to push the boundaries further and advance the traction limits of a racing car (without neglecting the first factor) is the pinnacle of a vehicle dynamics engineer's ability. This is the point of my interest.
The main objective of this project is to propose an alternative form of racing cars' suspension. One that will advance the limits of adhesion as set by the racing tires by:
making optimum use of the tire's surface
using the inevitable weight transfer to beneficial effects
To achieve these goals a number of approaches are considered. Decoupling the suspension's roll and vertical stiffness can be a promising case, as can be the passive camber control of the wheels. The validation of each approach is performed by means of simulating a Formula 1 racer model and the only criterion is the avibility to maximize traction.
During the past months, two alternative forms of suspension have given promising results. A variable stiffness suspension element, enabling maximization of both mechanical traction in low speed turns and high downforce in high velocities without altering the chassis height from the ground. The second is a novel suspension which enables the main four vehicle modes to be independently tuned. The contradicting requirements of tuning the Bounce, Roll and Pitch mode are familiar to every vehicle dynamicist. Furthermore, race car dynamics employ signifficant amounts of downforce, thus making the optimization of this problem even more difficult. The result is modern race cars that are so stiffly sprung that road irregularitis can not be properly tackled, a very prominent effect when riding over a kerb or entering/exiting a banked curve as clearly shown in the simulation videos. Mode decoupling enables each mode to be ideally tuned while there is signifficant amount of warp flexure to deal with the aforementioned cases. Both systems are fully mechanical and no form of guidance or control in conventional mechatronics fashion has been applied. While the simulation results are very encouraging, the validity of these ideas remains to be prooven in application.
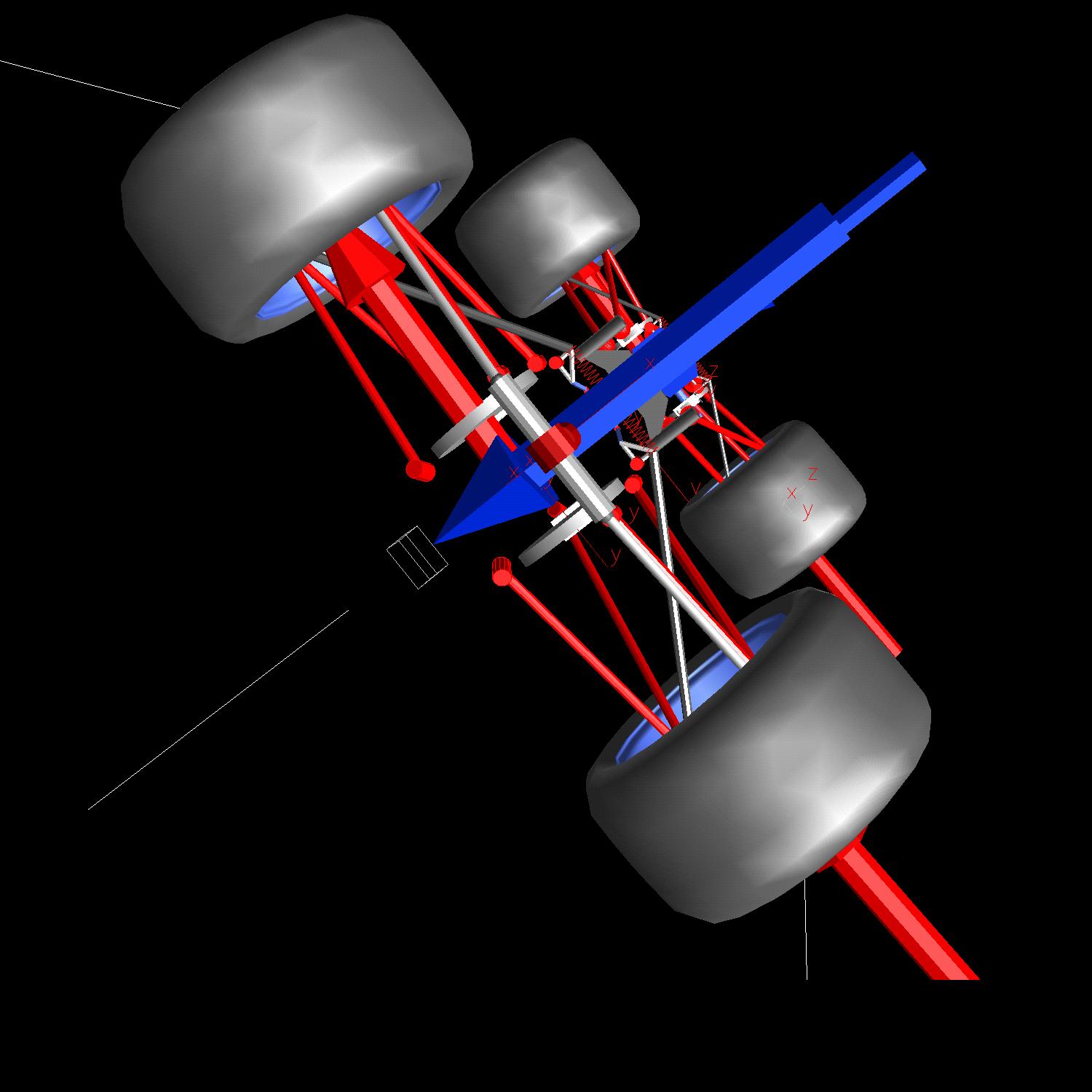
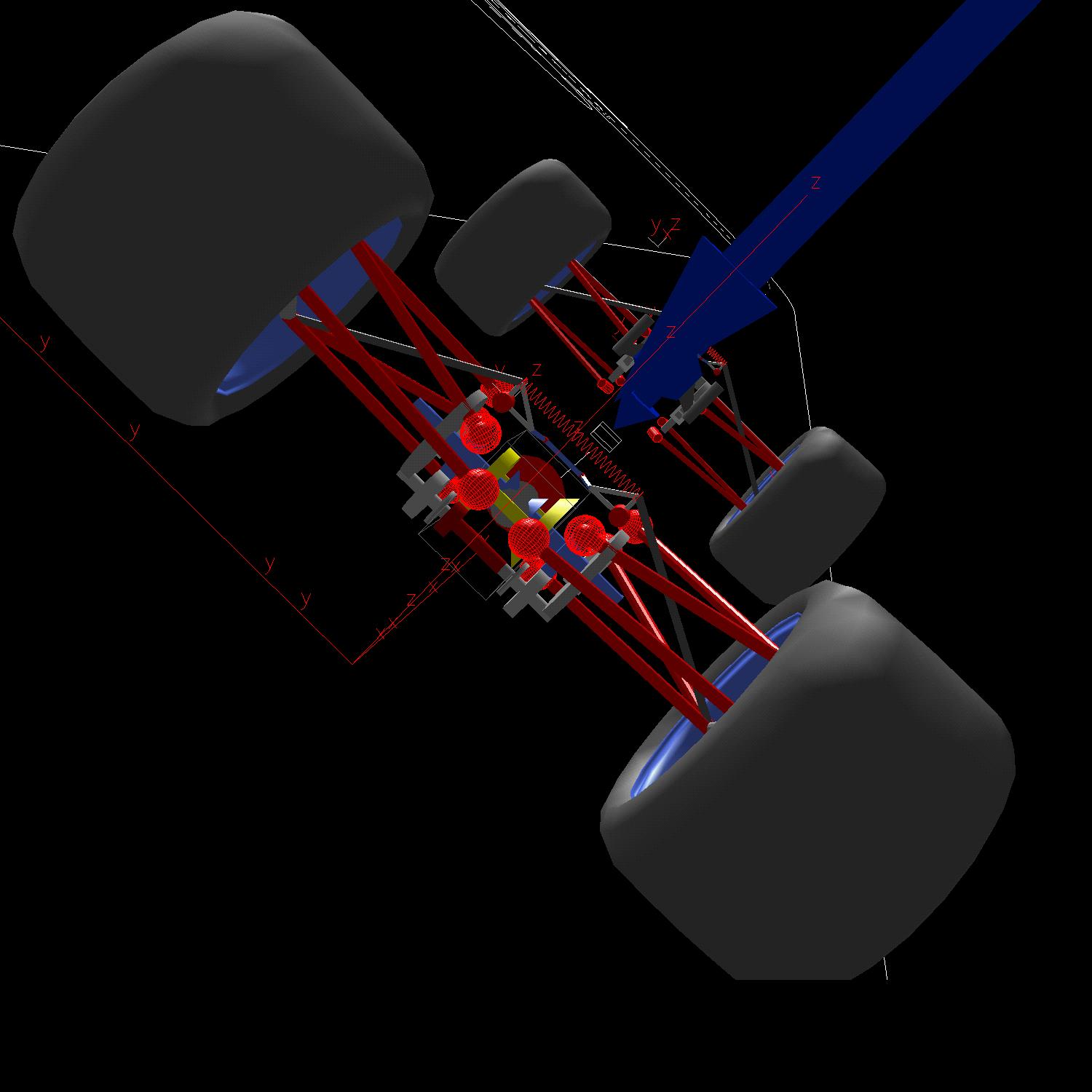
Mode Decoupling Suspension simulations
-
System principal function, simple decoupling unit & 8 cylinder chambers
-
System principal function, more complex decoupling unit & 4 cylinder chambers
-
Double lane change at 80m/s, crossing over the kerb, conventional suspension
-
Double lane change at 80m/s, crossing over the kerb, mode decoupling suspension
-
Over a small hill followed by negative camber turn, 65m/s, conventional suspension
-
Over a small hill followed by negative camber turn, 65m/s, mode decoupling suspension
Some more simulations
Contact
|
|
