 |
|
Project Description
The dynamics of biped walking machines is characterized by the nonlinear model, varying constraints and occurring impacts.
The power consumption of existing active walking robots is relatively large making locomotion feasible only for a very short period or with external power supply.
In this project the principle of "passive dynamic walking" is exploited in order to realize energy-efficient walking.
According to this principle a biped machine with knees is capable of walking down an inclined slope in a natural periodic gait.
By specifying appropriate initial conditions a walking cycle is generated and maintained by the dynamics of the legs powered only by gravity.
The passive walking cycle is characterized by impacts in the knee joint and between foot and ground.
The transfer of potential into kinetic energy while walking down the inclined slope is compensating for the occurring energy losses.
A periodic walking cycle is generated only for special initial conditions.
In order to find such initial conditions for a model the corresponding two point boundary value problem is solved iteratively.
For walking on even ground the same model with actuators in the joints is considered.
Using the passive motion as a reference the model can walk actively controlled on level ground with very low energy consumption.
Simulation results show that the power consumption of walking expressed in terms of specific resistance is comparatively low.
Therefore, continuous autonomous walking, i.e. walking with energy supply on board, seems feasible when exploiting the machine's natural dynamics.
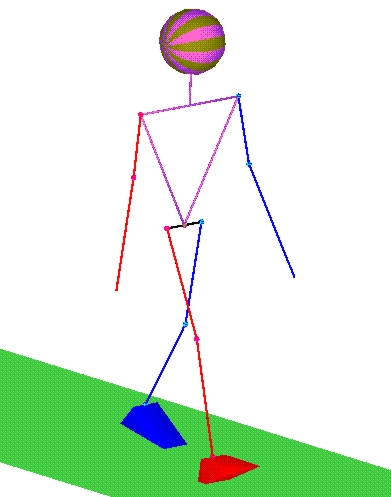
In order to include biological principles inverse dynamics simulations of human walking are performed.
One main interest concerns the swinging arm motion during locomotion.
These insights in human gait are used as a basis for the control design of the arm motion of a biped walking machine.
Publications
 |
Gruber, Stefan;
Schiehlen, Werner:
Balancing of Biped Walking Machines,
In: Proceedings of Euromech 375, Biology and Technology of Walking, Munich, Germany, March 23-25, 1998.
Org. by F. Pfeiffer, Lehrstuhl B für Mechanik, Technische Universität München, 1998, 57-65.
|
|
Gruber, Stefan;
Schiehlen, Werner:
Spatial Balancing of Biped Walking Machines,
In: Ro.Man.Sy. 12 - Theory and Practice of Robots and Manipulators, Proceedings of the Twelfth CISM-IFToMM Symposium,
Paris, France, July 6-9, 1998.
A. Morecki; G. Bianchi; M. Wojtyra (eds.),
Springer-Verlag, Wien, 1998, 369-376.
|
|
Gruber, Stefan:
Massenausgleich und Schwingungstilgung bei Robotern,
Zwischenbericht ZB-107. Stuttgart: Universität, Institut B für Mechanik, 1998.
|
|
Gruber, Stefan;
Schiehlen, Werner:
Low-Energy Biped Locomotion.
In: Ro.Man.Sy. 13 - Theory and Practice of Robots and Manipulators, Proceedings of the Thirteenth CISM-IFToMM Symposium, Zakopane, Poland, July 3-6, 2000.
A. Morecki; G. Bianchi; C. Rzymkowski (eds.),
Springer-Verlag, Wien, 2000, 459-466.
|
|
Gruber, Stefan;
Schiehlen, Werner:
Towards Autonomous Bipedal Walking.
In: CLAWAR 2001 -
Proceedings of the Fourth International Conference on Climbing and Walking Robots,
Karlsruhe, Germany, September 24-26, 2001.
K. Berns and R. Dillmann (eds.),
Professional Engineering Publishing Limited, Bury St Edmunds and London, UK, 2001, 757-762.
|
|
Gruber, Stefan;
Schiehlen, Werner:
Ein Beitrag zum autonomen zweibeinigen Gehen.
PAMM, Proceedings in Applied Mathematics and Mechanics 1, 1, 2002, 111-112.
|
|
Gruber, Stefan;
Ludwig, Oliver:
Analyse der Armbewegung beim menschlichen Gehen,
Zwischenbericht ZB-130. Stuttgart: Universität, Institut B für Mechanik, 2002.
|
|
Gruber, Stefan;
Schiehlen, Werner:
Inverse Dynamics Power Saving Control of Walking Machines.
In: Ro.Man.Sy. 14 - Theory and Practice of Robots and Manipulators, Proceedings of the Fourteenth CISM-IFToMM Symposium, Udine, Italy, July 1-4, 2002.
To appear.
|
|
Gruber, Stefan;
Schiehlen, Werner:
Biped Walking Machines: A Challenge to Dynamics and Mechatronics.
In: WCCM V - Fifth World Congress on Computational Mechanics, Online Proceedings, Vienna, Austria, July 7-12, 2002.
H. A. Mang, F. G. Rammerstorfer and J. Eberhardsteiner (eds.).
To appear.
|
|
Witte, Hartmut;
Fischer, Martin S.;
Gruber, Stefan;
Ludwig, Oliver;
Preuschoft, Holger:
Human bipedality: mechanical preconditions and morphological adaptions,
Courier Forschungsinstitut Senckenberg.
To appear.
|
Related Pages
Contact
|
|
