Lösung von Stoßproblemen ebener verformbarer Körper durch Lineare Komplementaritätsproblemen auf Lageebene
Beschreibung
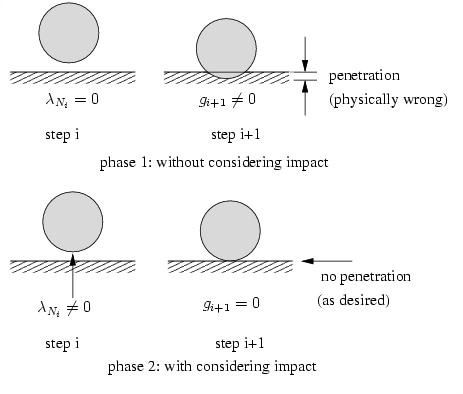
Die Beziehung zwischen der Normalenkraft des Schrittes i und dem Normalabstand des Schrittes i+1 von 4th Order explizite Runge-Kutta Verfahren
In dieser Arbeit präsentieren wir zuerst einen Ansatz für reibungsfreie Stöße verformbarer ebener Körper sowie die Formulierung eines LCPs auf Lage ebene ohne Verwendung eine Stoßzahl welche als Energieverlustmechanismus dient. Dieser Ansatz basiert auf der Einhaltung der Signorini Bedingungen für Stoßprobleme von Kontinua. Dabei wird zuerst der Körper mit FEM diskretisiert und dann mit einer finite Anzahl von Eigenmoden reduziert. Die Bewegungsgleichungen des verformbaren Körpers werden mit dem Ansatz des bewegten Bezugssystems erstellt. Dann werden die Normalabstände zwischen der stoßender Körper in Abhängigkeit der verallgemeinerten Koordinaten bestimmt. Im nächsten Schritt werden unter Verwendung verschiedene Integrationsmethoden, wie explizite Euler und explizite und implizite Runge-Kutta, die verallgemeinerten Beschleunigungen aus der Integration der Bewegungsgleichungen bestimmt, um einen zusammenhang mit den verallgemeinerten Koordinaten zu erstellen. Schliesslich werden die verallgemeinerten Koordinaten in die Beziehung der Normalabstände eingesetzt und das Stoßproblem ist als LCP formuliert. Lösen dieses Problems führt zur Lösung des Stoßproblems unter Berücksichtigung von Stoßkräften und Normalabständen. Darüberhinaus wird der Ansatz auf Reibstöße erweitert. Die Idee hinter dieser Ansatz folgt aus der Tatsache, dass im Fall verformbare Körper, dass Stoßverhalten in tangential Richtung ähnlich zu einem kontinuierliche Kontakt ist. Jedoch ist es offensichtlich, dass diese Annahme nur gültig für Stoßuntersuchung verformbare Körper ist. Im Falle von Stößen starrer Körper müssen diese zwei Vorgänge unterscheiden werden. Zusätslich könnten einige Formulierungen, basierend auf LCPs auf Geschwindigkeitseben vorgestellt und die Ergebnisse mit deren auf Lageebene vergleichen.

{kind=link}
{kind=link}
{kind=link}