 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Project Description
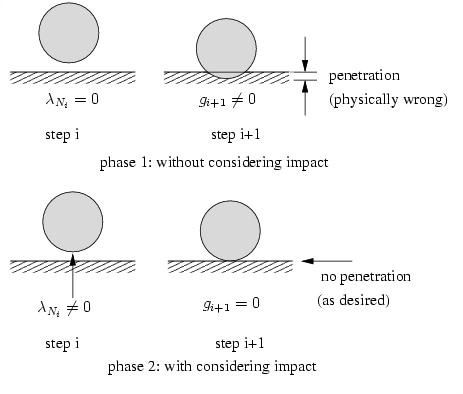
The motion of bodies in multibody systems is concerned with formulating the equations of motion and calculating kinematic and kinetic quantities governing the motion. For this purpose, all necessary factors affecting the dynamical behavior of the multibody systems have to be considered correctly. Contact and impact are among the most important and most difficult cases and play an essential role. Therefore, they are investigated extensively by many researchers and are reported frequently in the literature. In most of these contributions, the bodies are considered as being rigid and so the formulation of impact problem has been done following impact laws for rigid bodies. Due to the nature of impact, big forces will be exerted to the impacting bodies during a very short period of time. Therefore, in order to describe the physical process correctly, considering local deformations becomes an inevitable demand. In such situations, however, rigid body impact modeling can not be used any more and instead, the impact problem of deformable bodies must be solved. As our interest in this work, we present an approach for frictional impact of planar deformable bodies by formulating a linear complementarity problem (LCP) on position level. Formulating this approach for normal direction is based on the Signorini conditions for impact problem of continua. In doing so, first the bodies are discretized in finite elements and condensed with a finite number of eigen modes. The equations of motion of the deformable bodies are generated using the well know moving frame of reference approach. Then, the normal gaps between the two impacting bodies will be written in terms of the generalized coordinates. In the next step, following different integration methods, the generalized acceleration vector obtained from the equations of motion will be integrated to reach a relationship for the generalized coordinates. In fact, in this relationship the generalized coordinates will be written in terms of the Lagrangian multipliers indicating impact forces. At the end, by substituting the generalized coordinates in the relationship of normal gaps, the impact problem in normal direction will be formulated as a linear complementarity problem. Now, in order to consider friction, this formulation may be appended to the formulation of tangential contact forces developed for continual contact in [1]. The key issue behind this approach arises from this fact that in the case of deformable bodies the behaviour of impact in the tangential direction is similar to the one of continual contact for a short period of time. However, it is obvoius that this assumption is valid only for impact analysis of deformable bodies and in the case of rigid bodies impact analysis these two events must be distinguished. At this point it should be emphasized that in this formulation no coefficient of restitution has to be introduced for obtaining the impact law which promises a real condition of impact of deformable bodies. Although there exist some approaches for impact modeling of deformable bodies which introduce this coefficient as a measure of energy loss during impact event, in the real case no coefficient of restitution should be used since for deformable bodies, the energy loss can be taken into account by the material law containing damping. [1] Eberhard P. and Ebrahimi S.: On the use of linear complementarity problems for contact of planar flexible bodies. Proceedings of the ECCOMAS Thematic Conference on Multibody Dynamics, Goicolea J.M., Cuadrado J., and Garcia Orden J.C. (eds.), Spain, 2005. Examples
Related PagesContact |
{kind=link}
{kind=link}
{kind=link}
| Last modified
15.1.2013 ( |