 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Beschreibung
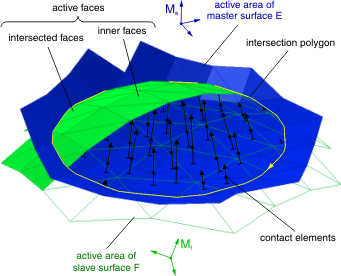
Die Modellierung des Kontaktvorgangs bei der dynamischen Simulation von Mehrkörpersystemen ist eine schwierige Aufgabe, der dieses Forschungsthema gewidmet ist. Vor allem mit der Berücksichtigung elastischer Körper nimmt diese Schwierigkeit zu, da es hierbei zu einem erheblich erhöhten Rechenaufwand kommt. Aufgrund der Flexibilität der Körper erschwert sich die Kontakterkennung, die zu jedem Zeitschritt der Simulation durchgeführt werden muß. Zur Modellierung von Kontakten gibt es zahlreiche Methoden, die häufig von Forschern und Ingenieuren angewandt werden. Für den allgemeinen Fall der Kontaktmodellierung ist die Gemeinsame-Oberflächen Methode eine sehr angemessene und geeignete Methode. Das Polygonale-Kontakt-Modell, auch PCM genannt, gehört zu dieser Sorte von Kontakmodellierungsmethoden [1]. PCM ist ein Mehrkörperdynamik Algorithmus zur Kontaktmodellierung von Starrkörpern bestehend aus komplizierten Geometrien, die durch polygonale Oberflächen beschrieben werden. Jede polygonale Oberfläche wird definiert durch einen Satz von Polygonen im Raum. Mit anderen Worten verwendet diese Darstellung Polygone als Eingang und liefert polygonale Oberflächen als Ausgang. Die ursprüngliche Implementierung von PCM wurde von G. Hippmann durchgeführt. Aus der Sicht der Mehrkörperdynamik verhält sich PCM wie ein Kraftelement, welches als benutzerdefinierte Routine in den kommerziellen MKS Code von SIMPACK eingebaut werder kann, ohne dass interne änderungen erforderlich werden. Kontaktprobleme zwischen elastischen Körpern spielen in der Technik eine wichtige Rolle, weshalb dieses Thema bereits mit erheblichem Aufwand untersucht wurde. Obgleich in der Mehrkörperdynamik viele Kontaktprobleme als Starrkörperkontakt betrachtet werden können, gibt es dennoch eine beträchtliche Zahl an Kontaktproblemen, bei denen die Elastizität der kontaktierenden Körper nicht vernachlässigt werden kann und daher eine Modellierung als Starrkörper nicht in Frage kommt. Dies macht eine elastische Kontaktmodellierung notwendig. Für die Modellierung elastischer Kontakte bietet sich an, das für starre Kontaktvorgänge entwickelte und bewährte Verfahren PCM zu erweitern. Die Ausgangslage für unsere Untersuchungen bildet der ursprüngliche Code von Hippmann, welcher auf starre Körper beschränkt ist. Dieser wurde sukzessive erweitert und angepasst, so dass auch elastische Kontaktvorgänge gerechnet werden können. [1] G. Hippmann: An algorithm for compliant contact between complexly shaped bodies. Multibody System Dynamics, Vol. 12, pp. 345--362, 2004. BeispieleWeitere Seiten zu diesem ThemaAnsprechpartner |
{kind=link}
{kind=link}
{kind=link}
| Letzte Änderung
15.11.2012 ( |