 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Project Description
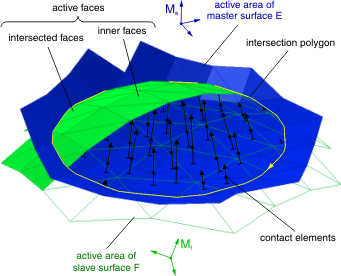
Contact modeling is one of the most difficult areas in the dynamical simulation of multibody systems and is an active research subject in this area. These difficulties will be significantly increased when dealing with the contact modeling of elastic bodies. Due to the nature of elastic problems, the contact modeling of elastic bodies is much more time consuming compared to the rigid bodies contact modeling. Flexibility of objects complicates the collision detection since the geometry of bodies changes and at each time they get new shapes. There are several methods of contact modeling which are used frequently by researchers and engineers. In the general case of contact modeling the compliance surface method has been identified to be the most suitable and applicable method. Polygonal Contact Model or PCM as a general algorithm of contact modeling belongs to this class [1]. PCM is an algorithm for contact modeling between rigid objects with complicated geometries described by polygonal surfaces in multibody dynamics. A polygonal surface is defined by a set of polygons in three dimensional space. In other words this representation takes polygons as input and produces polygonal surfaces as output. The original implementation of PCM is done by G. Hippmann. From the multibody dynamics point of view, PCM behaves as a force element which is going to be used as a user-defined routine in the commercial MBS code SIMPACK without requiring internal changes. Because of the importance of contact problems of elastic bodies, a considerable effort has been made in the investigation of this topic. Although in many problems of contact in multibody systems the bodies can be considered as rigid, there are still a number of contact problems where it is not acceptable to neglect the elasticities. In the applications where the flexibility of contacting bodies is not negligible, rigid body contact modeling can not achieve acceptable results and elastic body contact modeling should be utilized instead. Therefore, due to the importance and necessity of elastic body contact modeling, the extension of PCM for elastic bodies is very desirable and has been investigated. As an origin of our investigations we used the original code by Hippmann which is restricted to rigid bodies and extended and changed it so that flexible bodies can be considered, too. [1] G. Hippmann: An algorithm for compliant contact between complexly shaped bodies. Multibody System Dynamics, Vol. 12, pp. 345--362, 2004. ExamplesRelated PagesContact |
{kind=link}
{kind=link}
{kind=link}
| Last modified
15.1.2013 ( |