Moderne Maschinen, insbesondere Robotersysteme, müssen mit sehr
großen Arbeitsgeschwindigkeiten betrieben werden können. Um den
dafür notwendigen Energiebedarf zu optimieren, bestehen solche Systeme
typischerweise aus Leichtbaukomponenten. Die dadurch erreichte Reduzierung der
zu bewegenden Masse geht allerdings mit der nun deutlich gestiegenen
strukturellen Flexibilität der mechanischen Komponenten einher. Die
Einhaltung der Energieeffizienz erfordert daher meist eine komplexe
Regelungsstrategie, um Bahnfehler, die unmittelbar aus den Verformungen der
bewegten Bauteile resultieren, entsprechend zu korrigieren.
In diesem Projekt werden unkonventionelle Regelungsalgorithmen zur Beherrschung
der Deformationen in elastischen
Mehrkörpersystemen auf ihre praktische Anwendbarkeit
analysiert. Im Vordergrund stehen dabei solche Konzepte, die die spezielle
Struktur solcher Systeme ausnutzen und somit besondere Einblicke in deren
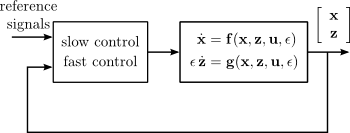
mathematischen Abläufe gewähren. Ein Beispiel für eines dieser Konzepte ist die
singuläre Störtheorie, die eine Aufteilung der Systeme in verschiedene
Zeitskalen ermöglicht, d.h. in zwei Systemteile, deren Dynamik sich erheblich
voneinander unterscheiden. Anhand dieser Separierung kann der Reglerentwurf und
der Stabilitätsbeweis des Regelkreises durchgeführt werden.