 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Project Description
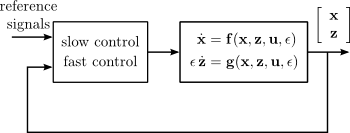
Modern machines, especially robot systems, must be able to operate at very high speeds. In order to optimize the necessary energy consumptions, such systems typically consist of lightweight components. The resultant reduction of the mass to be moved, however, goes hand in hand with the now much higher structural flexibility of the mechanical components. The compliance with the energy efficiency therefore requires a complex control strategy to correct errors that directly result from the deformation of the moving parts. In this project, unconventional control algorithms to control the deformations in flexible multibody systems are analyzed with respect to their practical applicability. The focus is on those concepts that exploit the special structure of such systems and thus provide a special insight into their mathematical processes. An example of one of these concepts is the singular perturbation method which allows to devide the system into subsystems with different time scales, i.e. into systems whose dynamics are very different from each other. Based on this classification, the controller design and stability analysis of the loop are performed.
Contact |
| Last modified
16.12.2009 ( |