 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Project Description
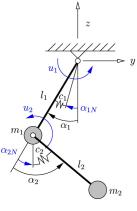
Many mechanical systems, like industrial robots, are characterized by highly nonlinear dynamics. They are usually controlled using their inverse dynamics. It turns out that the energy consumption of such a system can be very high. Therefore, autonomous robots have to be equipped with very big and heavy power supplies. Their weight increases the energy consumtion, too. Using local energy storage, the power demand of the actuators may be reduced. For simple systems it has been shown that elastic springs offer energy savings which may easily reach 50% or more. The task of this research is to find strategies on how to set the design parameters of the system, such as spring. One possibility is to adjust the natural motion of the system to a limit cycle which is close to the desired trajectory. Now, only low energy control is needed for some error compensation. Furthermore, inverse dynamics can be used to find some "optimal" force-position function for the actuators of the system. Using curve fitting supporting springs can be designed to reduce the amount of consumed energy. Contact |
| Last modified
15.1.2013 ( |