 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
|
|
|||
Beschreibung
Gegenwärtig erfolgt die industrielle Berechnung von Rädertrieben meist in Gesamtmodellen des Motors mit kommerziellen Mehrkörper-Programmsystemen. Die dort implementierten Zahnkontaktmodule basieren häufig auf starren Zahnrädern, die durch Feder-Dämpfer-Elemente gekoppelt sind. Um jedoch die Gesamtmasse der Motoren klein zu halten werden vorallem Zwischenräder im Rädertrieb oft mit sehr dünnen Radkörpern ausgeführt. Aufgrund der relativ hohen Elastizität dieser Radkörper kommt es zu dynamischen Effekten mit teils erheblichen Auswirkungen auf die Zahnkräfte. So kann es z.B. passieren, dass durch die Deformation mehrere Zahnpaare tragen, was bei starrer Betrachtung aufgrund der Geometrie nicht möglich wäre.
 Eine präzisere Beschreibung verlangt daher elastische Modelle. Im
Projekt wird eine modale Beschreibung eines durch Finite Elemente
diskretisierten Körpers bezüglich eines bewegten Referenzsystems
verwendet. Die Kontaktbeschreibung erfolgt auf Knotenebene durch einen
Node-to-Segment Penalty-Ansatz. Dies stellt eine sehr allgemeine
Beschreibung dar und erlaubt damit die Beschreibung nahezu beliebiger
Verzahnungsgeometrien inklusive in der Praxis häufig vorkommenden
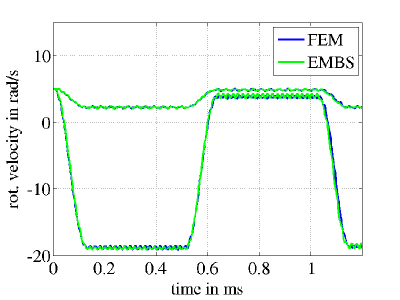
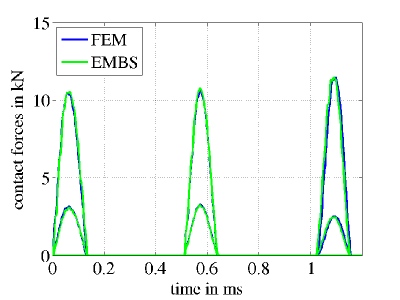
Verzahnungskorrekturen. Die Abbildung rechts zeigt den Vergleich
zwischen dem beschriebenen elastischen Modell mit einer Finite
Elemente Untersuchung für mehrere stoßartige Kontakte für ein
schrägverzahntes Radpaar.
Eine präzisere Beschreibung verlangt daher elastische Modelle. Im
Projekt wird eine modale Beschreibung eines durch Finite Elemente
diskretisierten Körpers bezüglich eines bewegten Referenzsystems
verwendet. Die Kontaktbeschreibung erfolgt auf Knotenebene durch einen
Node-to-Segment Penalty-Ansatz. Dies stellt eine sehr allgemeine
Beschreibung dar und erlaubt damit die Beschreibung nahezu beliebiger
Verzahnungsgeometrien inklusive in der Praxis häufig vorkommenden
Verzahnungskorrekturen. Die Abbildung rechts zeigt den Vergleich
zwischen dem beschriebenen elastischen Modell mit einer Finite
Elemente Untersuchung für mehrere stoßartige Kontakte für ein
schrägverzahntes Radpaar.
Gleichzeitig ist diese Beschreibung sehr effizient. Durch die modale Beschreibung wird die Zahl der Freiheitsgrade gegenüber der Finite Elemente Modelle erheblich reduziert. Darüber hinaus ist durch die spezielle Geometrie der Zahnräder eine eindeutige Zuordnung der Kontaktflächen zueinander gegeben. In einer der Kontaktberechnung auf Knotenebene vorgelagerten Groberkennung kann daher die Zahl der Knoten für die numerisch teure Kontakterkennung erheblich reduziert werden. In Verbindung mit einem expliziten Integrationsverfahren erhält man so ein sehr effizientes vollelastisches Zahnradmodell zur transienten Simulation im Zeitbereich. Man erhält Simulationsergebnisse in der Qualität von entsprechenden Finite Elemente Simulationen, jedoch mit Rechenzeiten, die je nach Diskretisierung um einen Faktor 200-500 kürzer sind. Durch die effiziente und speichersparende Beschreibung der elastischen Zahnräder ist es möglich nicht nur einzelne Räder und einzelne Kontakte zu untersuchen. Auch ganze Rädertriebe mit Zahnrädern in technisch relevanter Diskretisierung können in praktisch akzeptablen Rechenzeiten untersucht werden. Weitere Seiten zu diesem ThemaAnsprechpartner |
 Der Antrieb der Nockenwellen in Verbrennungsmotoren über den
Kurbeltrieb kann mittels Rädertrieben. Diese bestehen typischerweise
aus mehreren Zahnradstufen, mit entsprechenden
Zähnezahlverhältnissen. Oft werden Rädertriebe auch dazu verwendet
Zusatzaggregate, wie Hochdruck- oder Wasserpumpen anzutreiben. In
Verbindung mit Gaskräften verursachen diese Nebenaggregate sehr hohe
Wechsellasten. Diese können zum Abheben der Flanken, und damit zum
Hin- und Herschlagen der Zähne im Zahnspiel führen. Aufgrund der
daraus resultierenden Lärmbelastung wird dies als Rädertriebhämmern
bezeichnet. Da diese Kontakte stoßartigen Charakter haben, ergeben
sich sehr kurze und hohe dynamische Zahnkräfte. Neben des negativen
Einflusses dieser Stöße auf die Lebensdauer der Räder, führen die
Stoßkräfte hauptsächlich zu sehr lokalen Deformationen im
Kontaktbereich und Wellenausbreitung im Zahnrad. Beide Effekte können
durch Starrkörpermodelle nicht ausreichend beschrieben werden, sind
jedoch für eine präzise Berechnung der Kontaktkräfte zwingend.
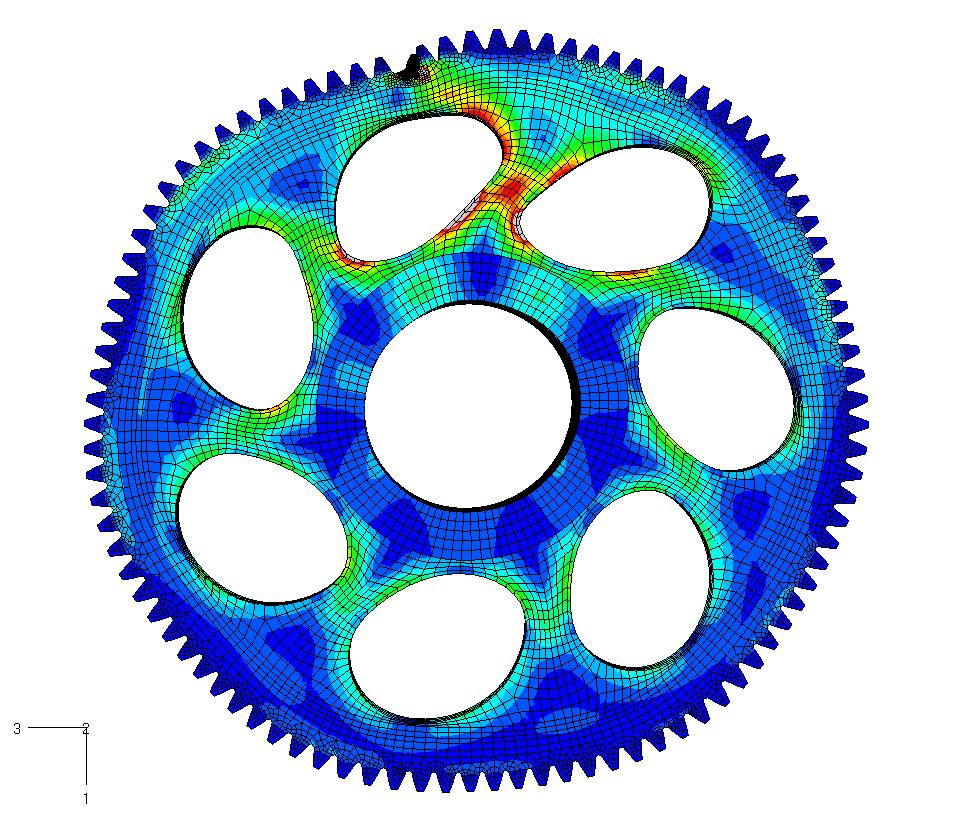
Die Abbildung rechts zeigt die Polygonisierung des Radkörpers unter
einer stoßartigen Kontaktkraft. Die Polygonalisierung entsteht durch
die spezielle Radkörpergeometrie und Wellenausbreitung im Zahnrad. Die
Deformation ist um den Faktor 500 überhöht dargestellt.
Der Antrieb der Nockenwellen in Verbrennungsmotoren über den
Kurbeltrieb kann mittels Rädertrieben. Diese bestehen typischerweise
aus mehreren Zahnradstufen, mit entsprechenden
Zähnezahlverhältnissen. Oft werden Rädertriebe auch dazu verwendet
Zusatzaggregate, wie Hochdruck- oder Wasserpumpen anzutreiben. In
Verbindung mit Gaskräften verursachen diese Nebenaggregate sehr hohe
Wechsellasten. Diese können zum Abheben der Flanken, und damit zum
Hin- und Herschlagen der Zähne im Zahnspiel führen. Aufgrund der
daraus resultierenden Lärmbelastung wird dies als Rädertriebhämmern
bezeichnet. Da diese Kontakte stoßartigen Charakter haben, ergeben
sich sehr kurze und hohe dynamische Zahnkräfte. Neben des negativen
Einflusses dieser Stöße auf die Lebensdauer der Räder, führen die
Stoßkräfte hauptsächlich zu sehr lokalen Deformationen im
Kontaktbereich und Wellenausbreitung im Zahnrad. Beide Effekte können
durch Starrkörpermodelle nicht ausreichend beschrieben werden, sind
jedoch für eine präzise Berechnung der Kontaktkräfte zwingend.
Die Abbildung rechts zeigt die Polygonisierung des Radkörpers unter
einer stoßartigen Kontaktkraft. Die Polygonalisierung entsteht durch
die spezielle Radkörpergeometrie und Wellenausbreitung im Zahnrad. Die
Deformation ist um den Faktor 500 überhöht dargestellt.
| Letzte Änderung
8.4.2013 ( |