 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
Project DescriptionThis project focuses on the problem of cooperative motion of swarm mobile robots commonly searching for a target. Groups of robots, especially groups of mobile robots are made up of many simple individuals but give a super behavior in a colony and can be used in many important scenarios. For example, in this project a group of mobile robots are proposed to look for a common goal. Such an application more attention has been paid in recent years. However, controlling a swarm robotic system directly to do such desired behaviors is still a challenge which evokes many research interests.In this project, we - first of all build a swarm model based on their mechanical properties in the view of multibody dynamics, - then design the corresponding control scheme and a simulation platform, including
- Further on, some extensions are also researched like localization, communication, trajectory/target tracking etc. Some of the interesting points from this project are, e.g., how the individual robots coordinate each other so as to exhibit global swarm behaviors when each of them only performs simple actions with limited communication ability or how system robustness against failure of individuals can be reached. Screen Shot of the Simulation Platform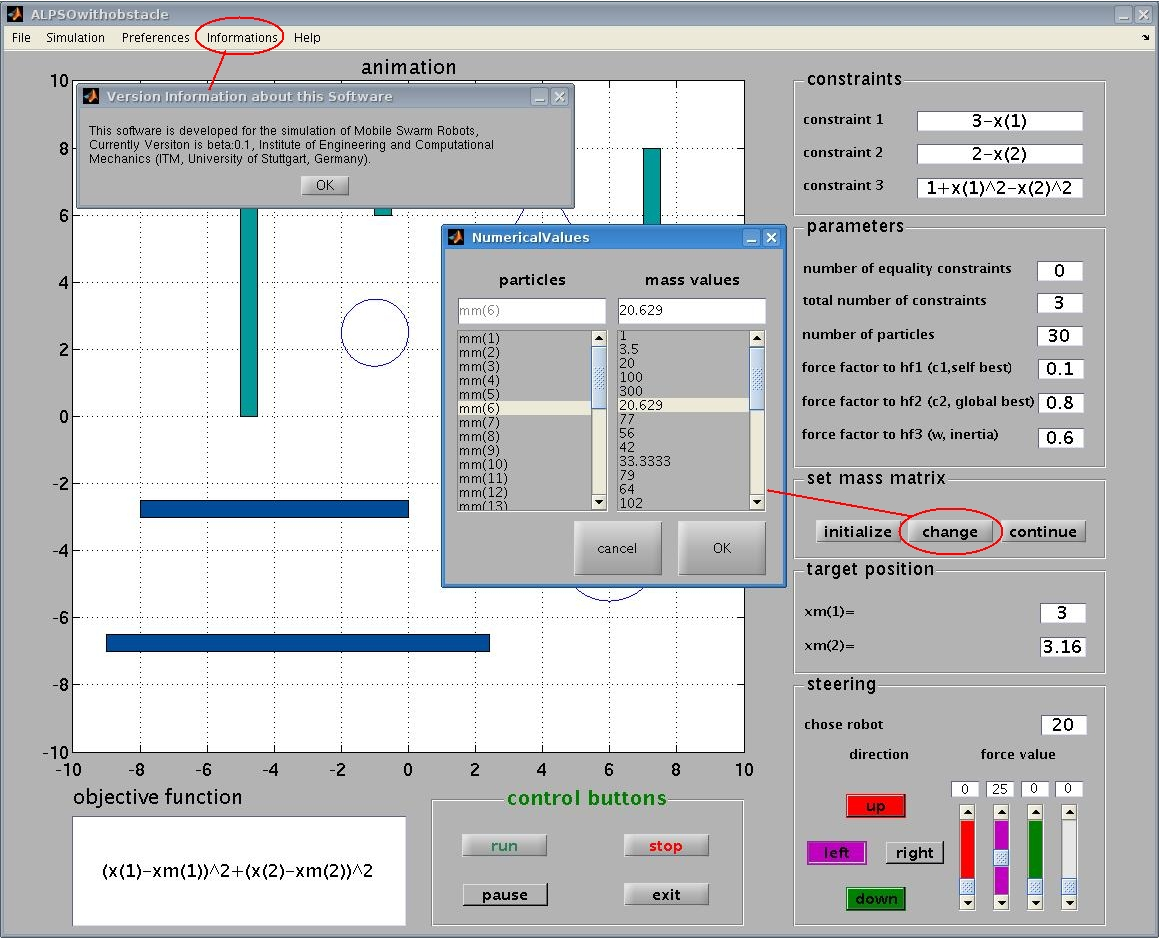
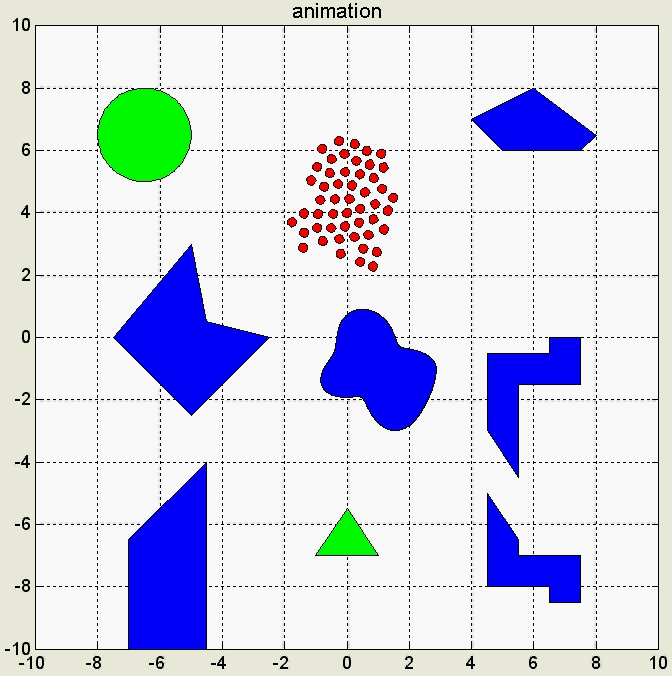
Simulation Platform (developed in MATLAB GUI) Some Simulation Figures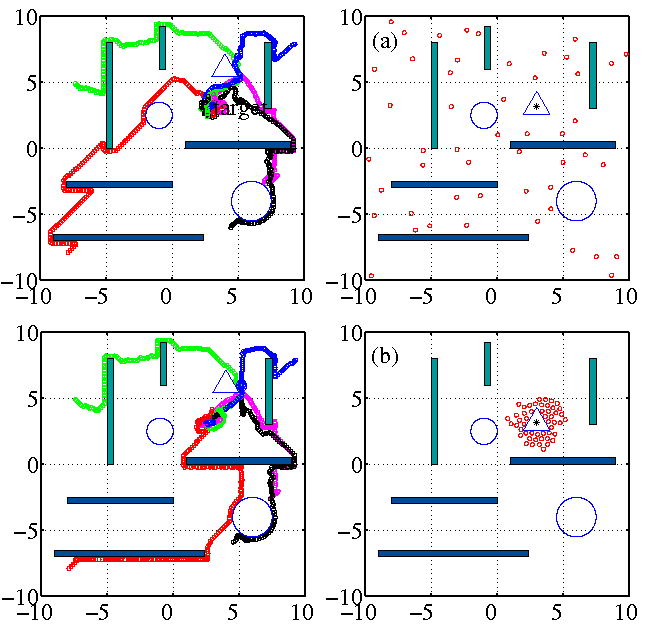
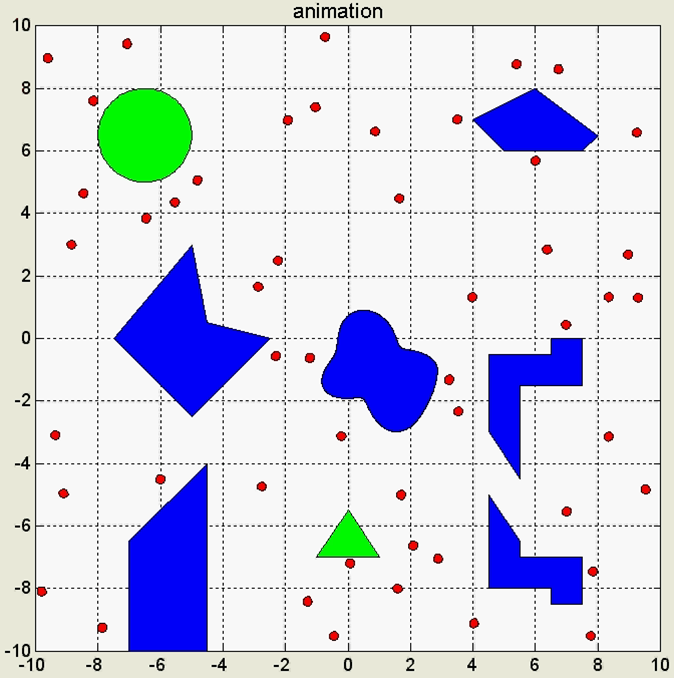
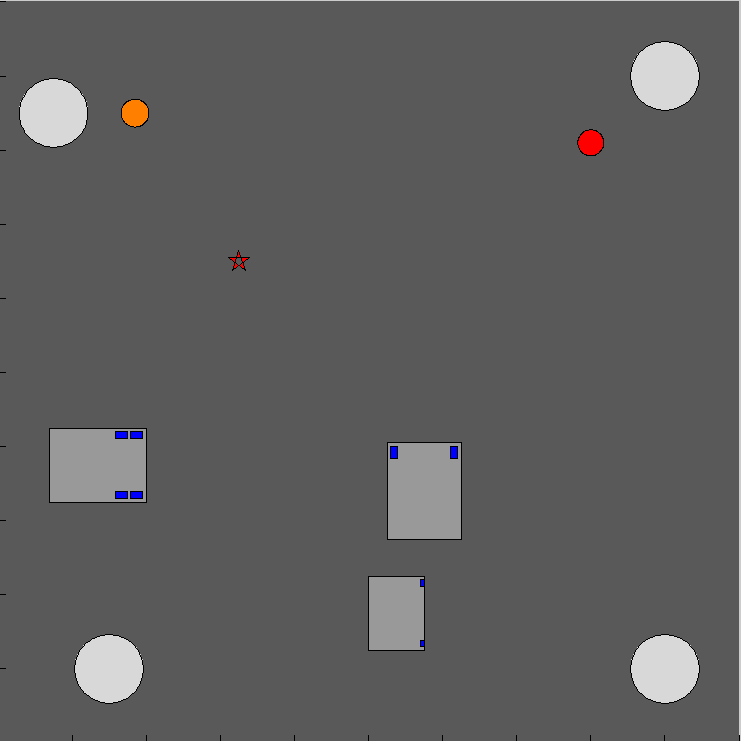
Simulation in a Simple Environment
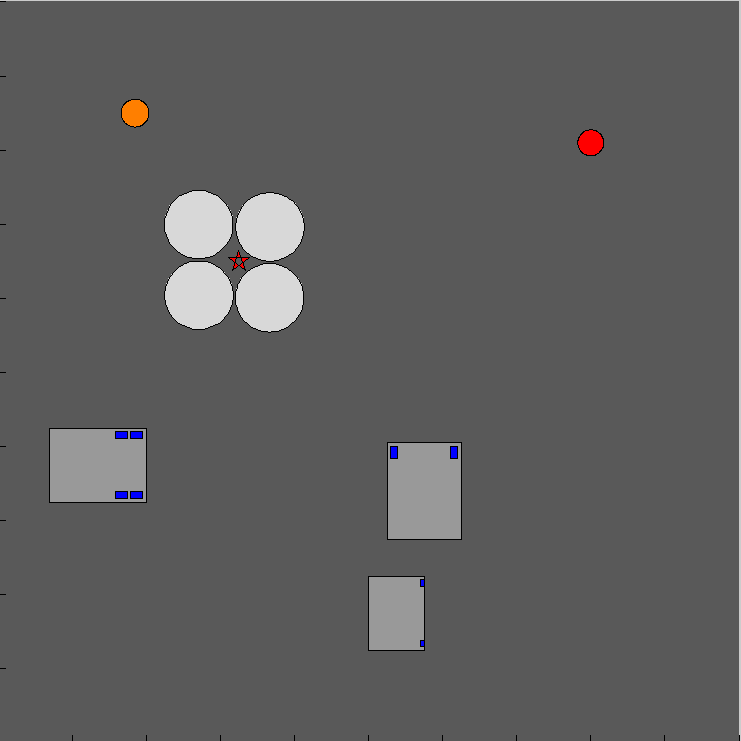
(a) Initial State (b) Final State (See Animation) Demonstration of the Idea with Real Mobile Robots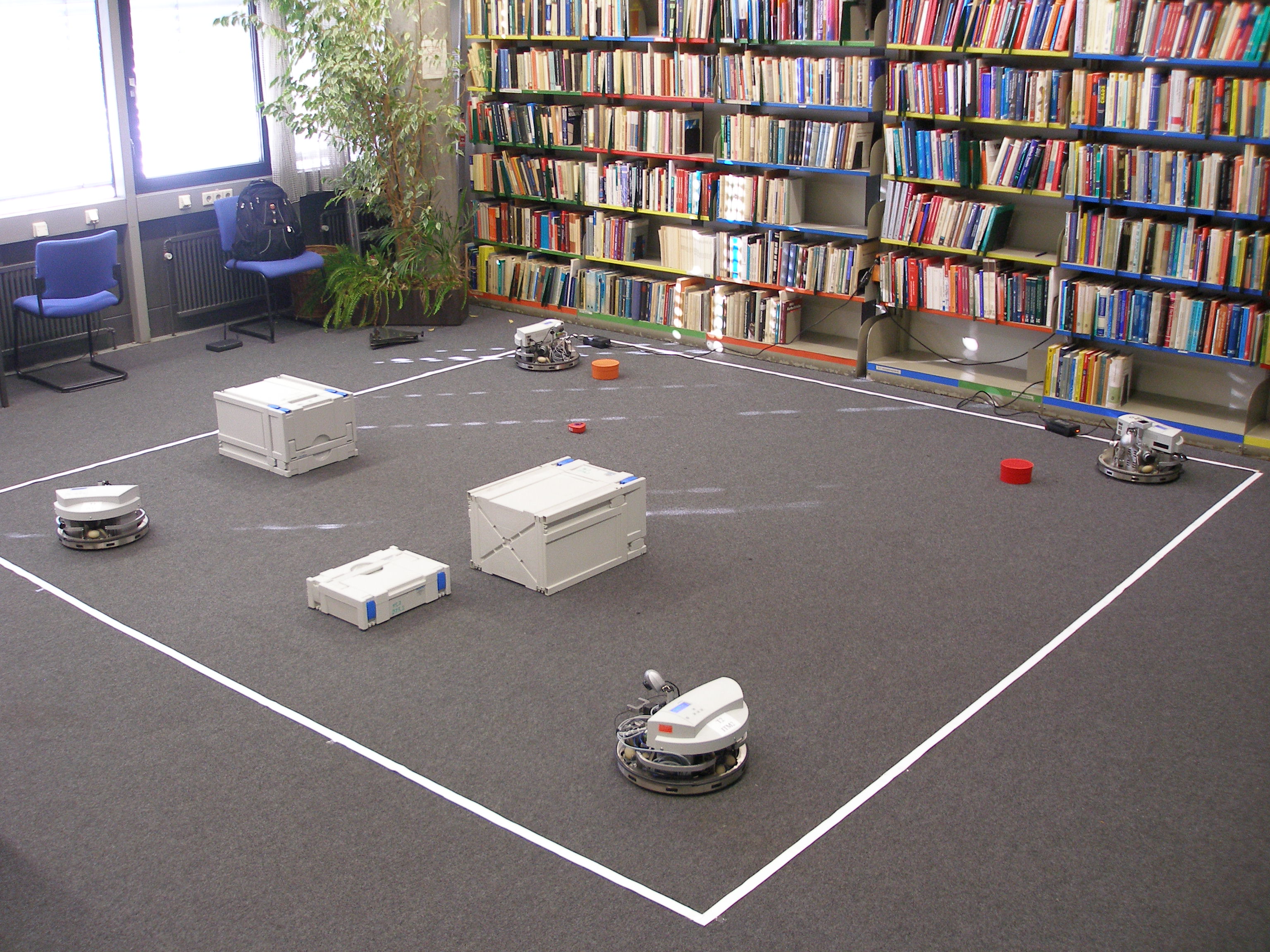
Tested in ITM Library Related Pages
ContactFor more information or any questions please contact |
| Last modified
16.7.2015 ( |