 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
BeschreibungIm Fokus dieses Projekts steht die kooperative Bewegung von mobilen „Schwarmrobotern&ldquo beim gemeinsamen Ansteuern eines Ziels. Gruppen von Robotern, insbesondere Gruppen von mobilen Robotern, bestehen aus vielen, meist einfachen Individuen, die jedoch durch ihre Gemeinschaft komplexe Aufgaben ausführen können. Solche Robotersysteme kommen daher schon heute in vielen Gebieten zum Einsatz. In diesem Projekt wird eine Gruppe von mobilen Robotern zum Auffinden eines gemeinsames Ziels benutzt. Derartige Anwendungen wurden in den letzten Jahren mit zunehmendem Interesse wissenschaftlich untersucht. Die Kontrolle eines solchen Schwarms von Robotern ist allerdings eine große Herausforderung und bietet noch immer eine Vielzahl an interessanten Forschungsthemen.In diesem Projekt, - wird zunächst ein Schwarm-Modell mit mechanischen Eigenschaften basierend auf den Methoden der Mehrkörperdynamik aufgebaut. - Darauf stützend wird ein entsprechendes Steuerungsschema und eine Simulationsplattform entwickelt. Wichtige Punkte hierbei sind:
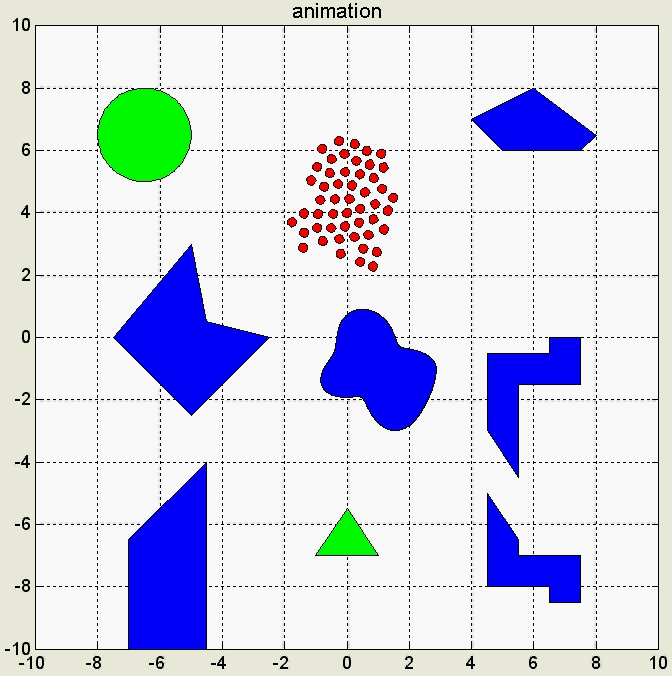
- Weitere Forschungsinteressen beinhalten die Lokalisierung, Kommunikation, Bahnverfolgung, usw. Einige interessante Punkte des Projekts sind beispielsweise die gegenseitige Koordination der Roboter, die ein globales Schwarmverhalten aufweisen sollen, während jeder einzelne nur simple Bewegungen ausführt und die Kommunikationsfähigkeiten begrenzt sind. Ebenfalls von Interesse ist, wie die Robustheit des Systems gegen Ausfälle des Einzelnen erreicht werden kann. Screen shot der Simulationsplattform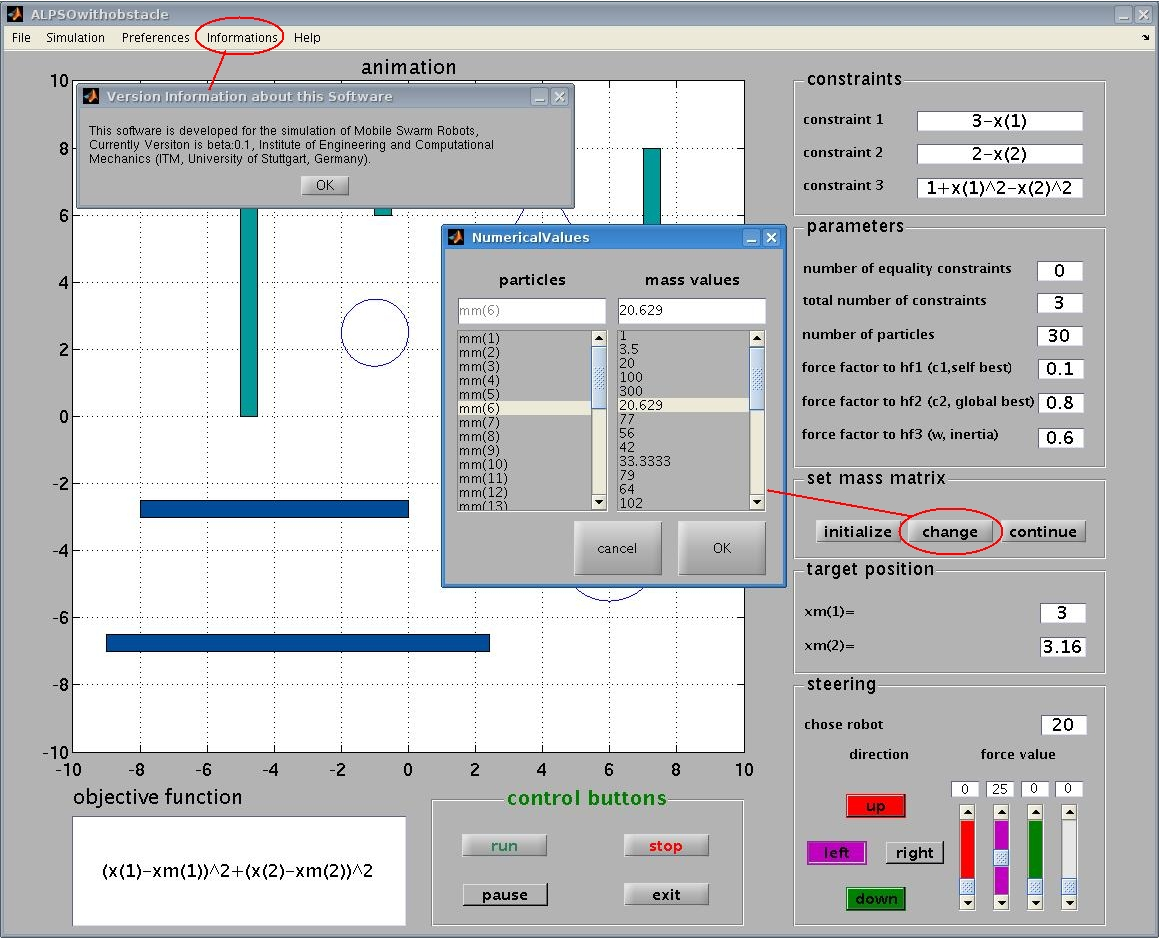
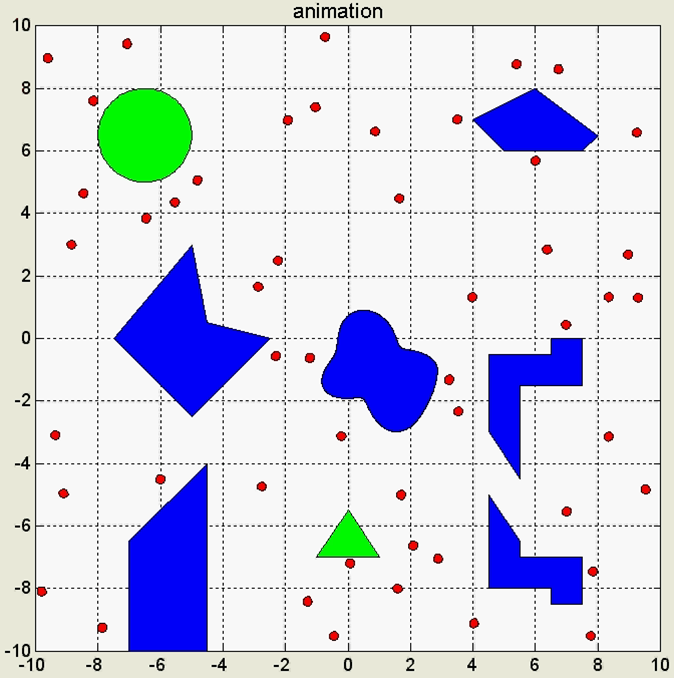
Die Simulationsplattform(es wird in MATLAB GUI entwickelt) Einige Bilder der Simulation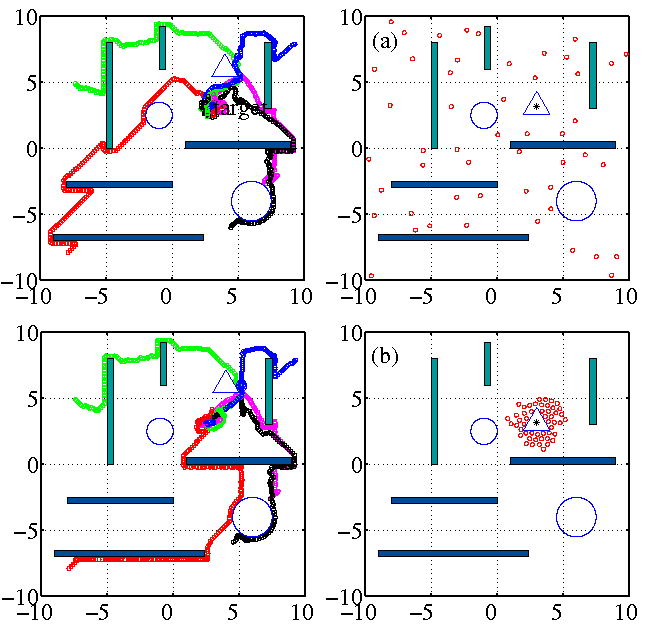
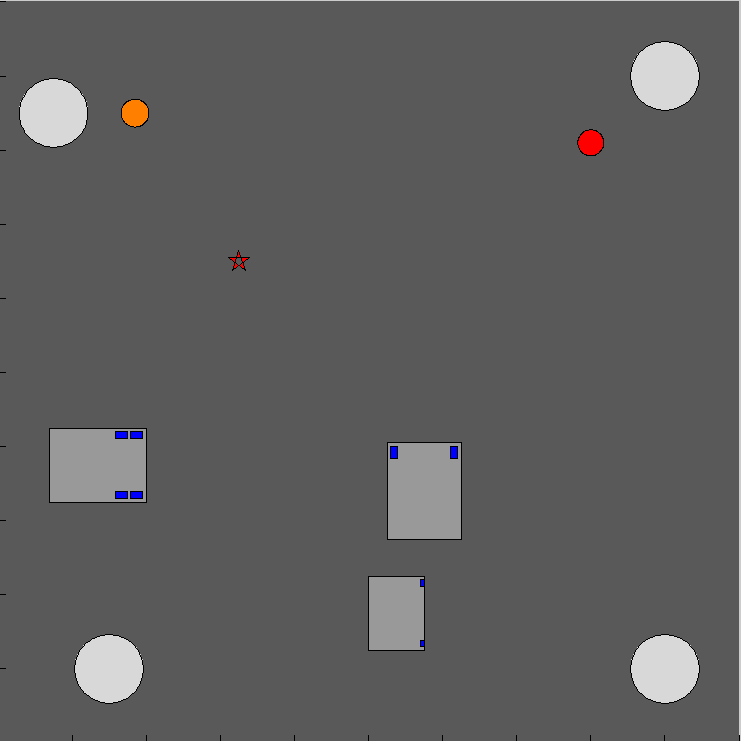
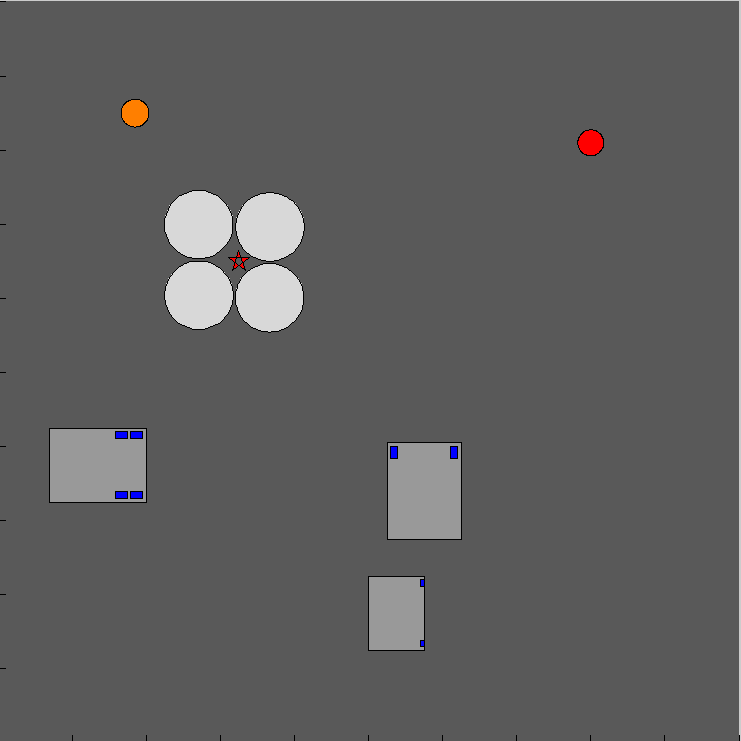
Die Simulation in einer einfachen Umgebung
(a) Anfangszustand (b) Endzustand (zeigen Animation) Demonstration der Idee mit echten mobilen Robotern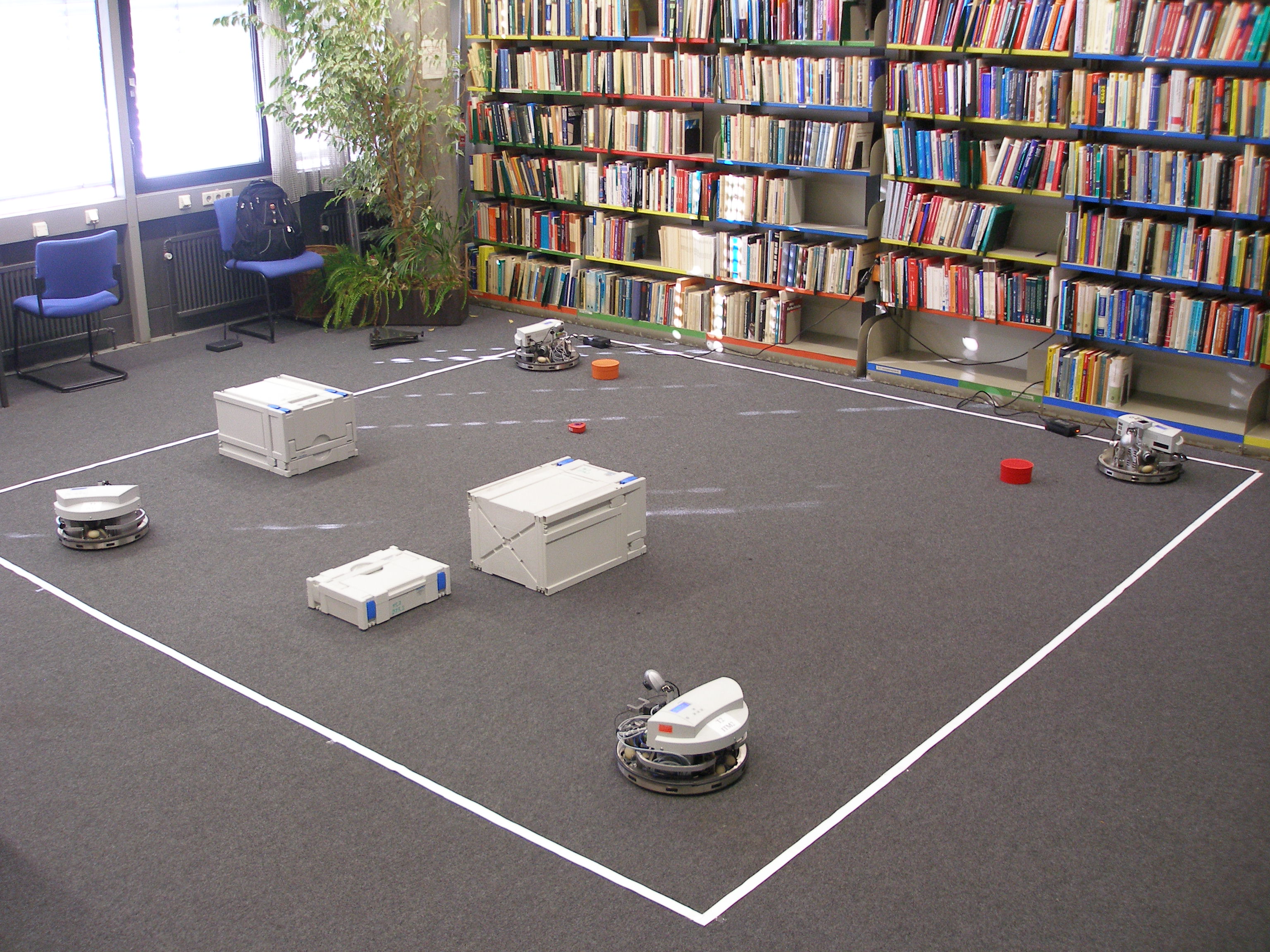
Tested in der Bibliothek von ITM Weitere Seiten zu diesem Thema
Ansprechpartnerweitere Informationen oder Fragen , kontaktieren Sie bitte mit uns Note: This German version of website-"Schwarm Robotik und Optimierung" was originally translated by Qirong Tang from that English version, and it was strongly embellished and improved by Thomas Gorius. |
| Letzte Änderung
16.7.2015 ( |