 |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
|
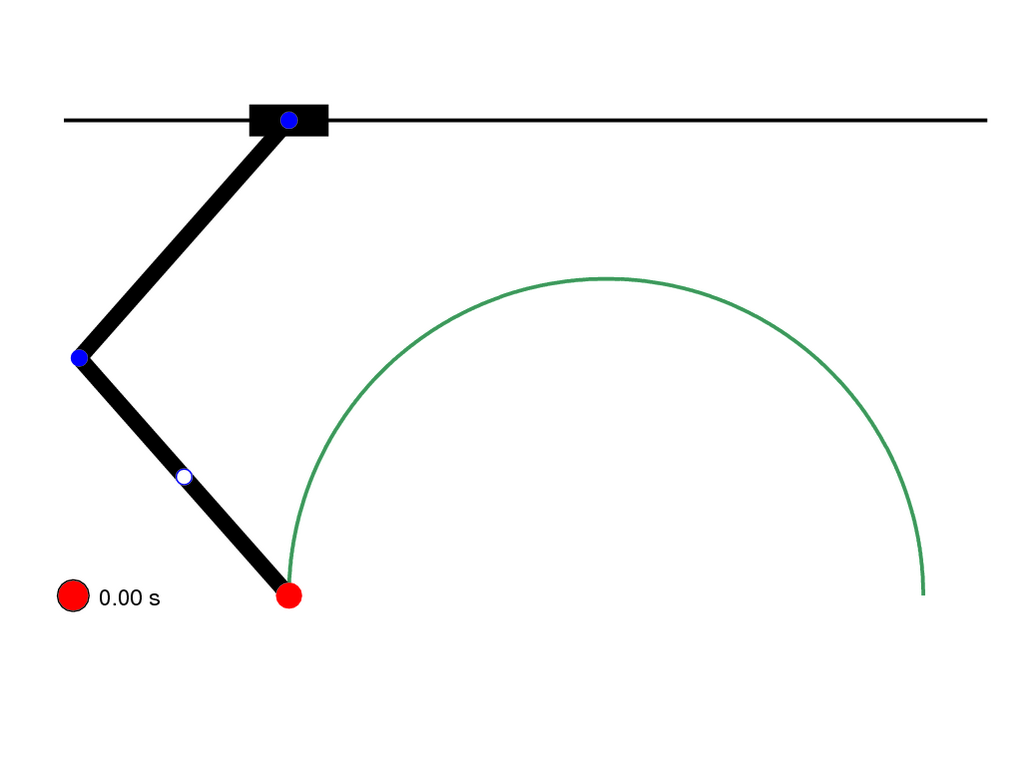
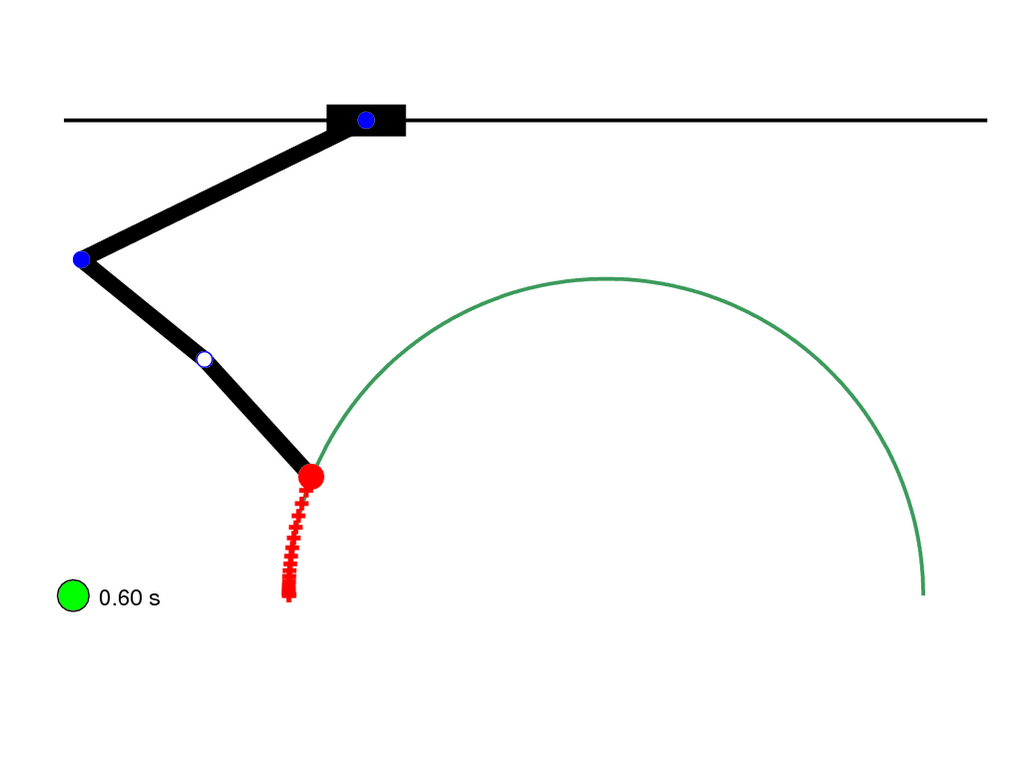
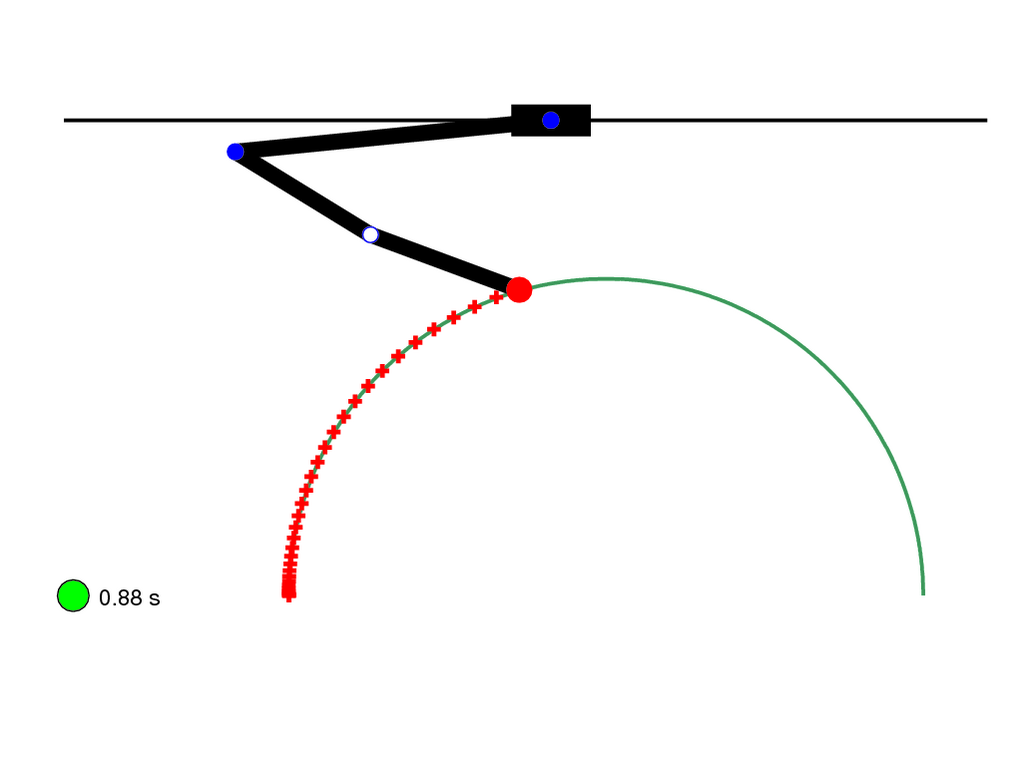
Unteraktuierte Mehrkörpersysteme haben weniger Aktuatoren als Freiheitsgrade. Eine typische Ursache von Unteraktuiertheit sind passive Gelenke. Diese können aus einer kostenbedingten Reduktion der Anzahl von Antrieben oder durch fehlerbedingten Ausfall eines Antriebs während des Betriebes stammen. Ein anderes wichtiges Beispiel von Unteraktuiertheit sind elastische Mehrkörpersysteme, wie z.B. Roboterarme oder Werkzeugmaschinen in Leichtbauweise. Diese gewinnen in industrieller Anwendung stark an Bedeutung um erhöhte Produktivitätsansprüche bei verringertem Energieverbrauch zu erreichen. Unteraktuierte Mehrkörpersysteme sind oft nicht-minimalphasig, und daher ist die Regelung von Arbeitspunktwechseln und der Trajektorienfolge viel schwieriger als im voll aktuierten Fall. Es wird eine Reglerstruktur mit zwei Entwurfsfreiheitsgraden verwendet. Diese kombiniert eine Vorsteuerung mit einer zusätzlichen Regelung die kleine Störungen ausgleicht. Der Entwurf einer Vorsteuerung basiert auf einem inversen Modell des unteraktuierten Mehrkörpersystems. Der Ausgangspunkt ist dabei die Transformation des Mehrkörpersystems in die nichtlineare Eingangs-Ausgangs Normalform. Unter Verwendung der speziellen Struktur der Bewegungsgleichungen und eine Aufteilung in aktuierte und nicht-aktuierte Freiheitsgrade kann die Eingangs-Ausgangs Normalform effizient bestimmt werden, ohne dass Lie-Ableitungen im Zustandsraum explizit berechnet werden müssen. Basierend auf der Eingangs-Ausgangs Normalform wird das inverse Modell erstellt. Dies besteht aus einer Kette von Differenzierern, einer angetriebenen internen Dynamik und einem algebraischen Teil. Um für nicht-minimalphasige Mehrkörpersysteme eine zulässige Vorsteuerung zu erhalten, muss eine beschränkte Lösung für die angetriebene interne Dynamik berechnet werden. Dies führt auf die numerische Lösung eines zweiseitigen Randwertproblems. Inverse Modelle sind nicht nur notwendig für die Regelung unteraktuierter Mehrkörpersysteme, sondern sind auch oft nützlich bei der Optimierung solcher Systeme. Daher bilden genaue und effiziente Modell unteraktuierter Mehrkörpersysteme zusammen mit ihren entsprechenden inversen Modellen die Basis für die weitere Forschung auf dem Gebiet der Regelung und Optimierung unteraktuierter Mehrkörpersysteme. Dies gilt im Besonderen für moderne Maschinenentwürfe in Leichtbauweise. Ansprechpartner |
| Letzte Änderung
3.9.2013 ( |