Institute of Engineering and Computational Mechanics
Analysis, Control and Optimization of Underactuated Multibody Systems
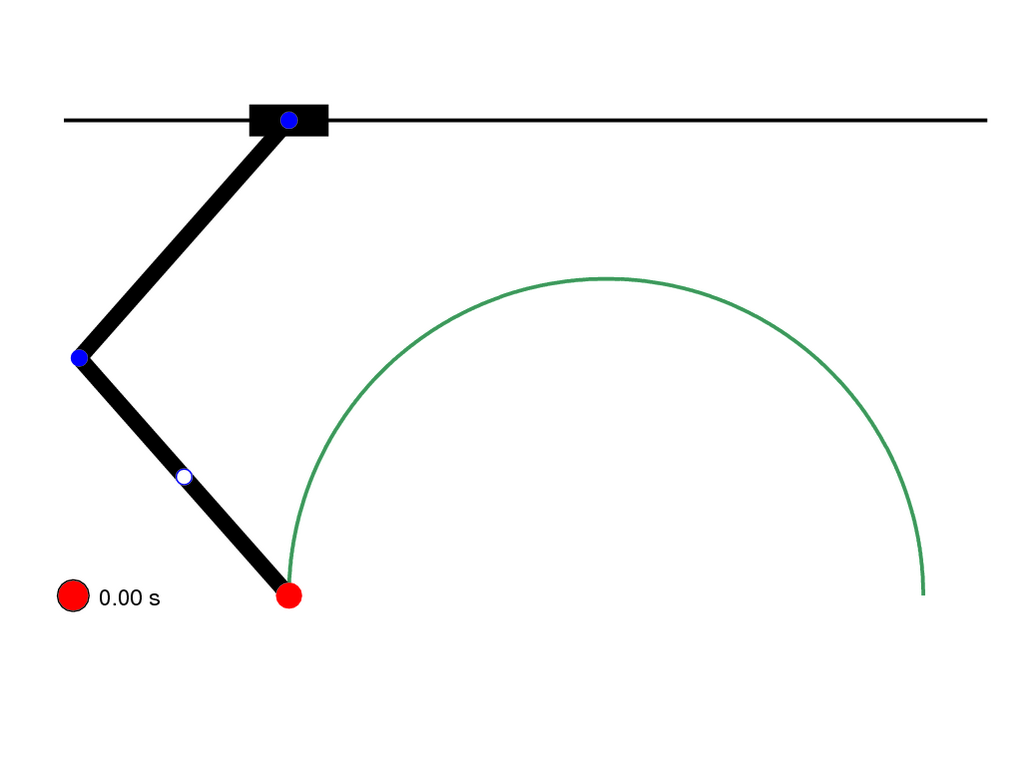
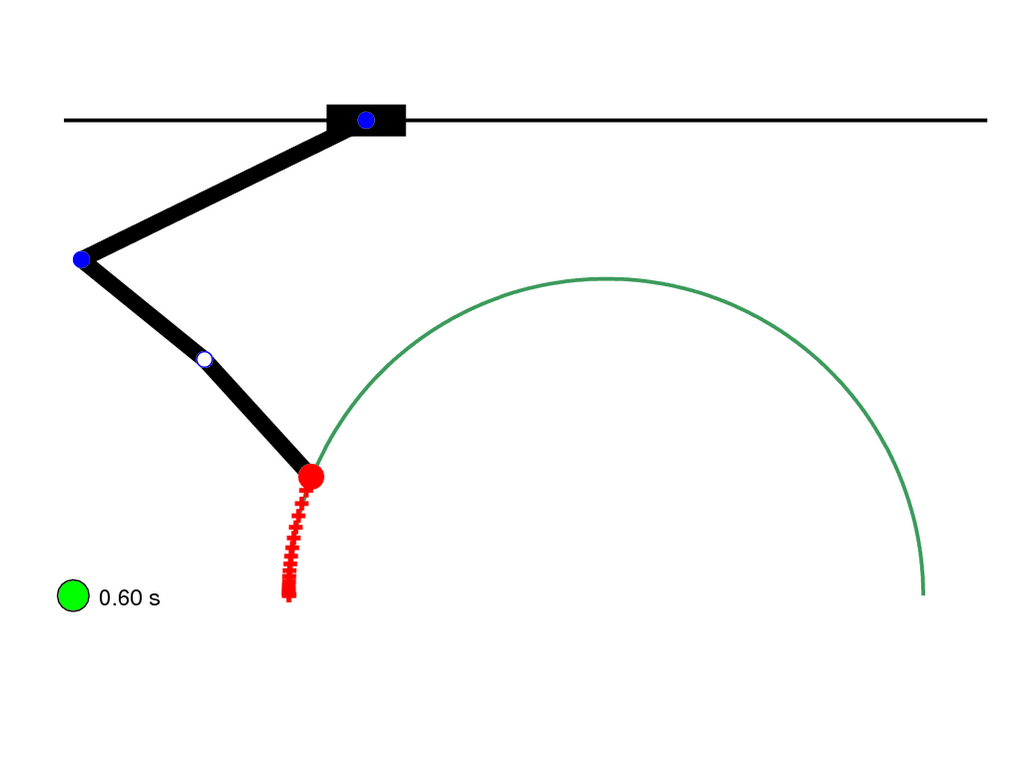
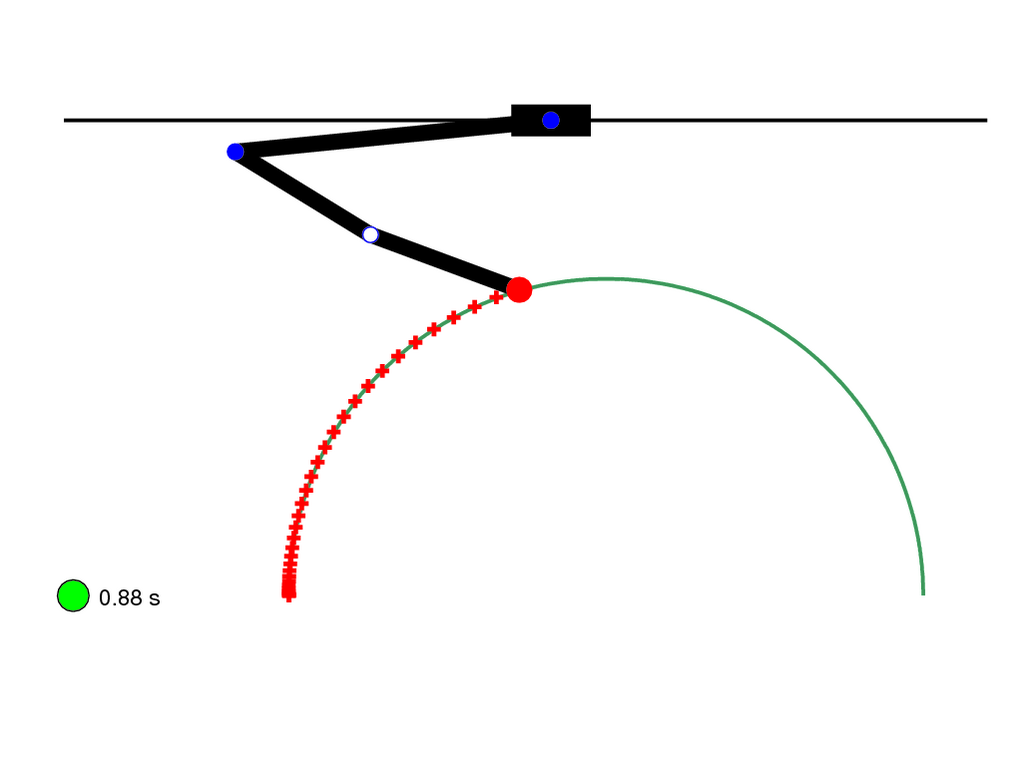
End-effector trajectory tracking of an underactuated MBS (joint 3 is passive)
Underactuated multibody systems have less control inputs than generalized coordinates. A typical source of underactuation in multibody systems is the presence of passive joints. These may result from a cost driven reduction of the number of actuators or from a failure of a actuator during an operational task.
Other important examples of underactuation are elastic multibody systems such as flexible manipulators or machine tools in light-weight design. These become increasingly important in industrial applications to meet high productivity and low energy consumption requirements.
Underactuated multibody systems are often non-minimal phase, and therefore, control of working point changes and trajectory tracking are much more challenging tasks than in the fully actuated case.
A so-called two-degree of freedom control structure is used, which is a combination of inversion-based feedforward control with additional feedback control to account for small disturbances.
The feedforward control design is based on an inverse model of the multibody system. The starting point is the transformation of the multibody system into the nonlinear input-output normal-form. Using the special structure of the second order differential equation of motion and a separation into actuated and un-actuated coordinates, the nonlinear input-output normal-form can be established in a straight forward way, without the explicit computation of Lie-derivatives in state-space.
Based on the nonlinear input-output normal-form the inverse model is established, consisting of a chain of two differentiators, a driven internal dynamics and an algebraic part which computes from these quantities the desired control input. In order to obtain for non-minimum phase multibody systems a feasible feed-forward control for trajectory tracking a bounded solution for the internal dynamics has to be found. This requires the numerical solution of a two-sided boundary value problem.
Inverse models are not only necessary for control of underactuated multibody systems, but are also useful in the optimization of these systems. Therefore, the combination of accurate and efficient multibody system models, along with their corresponding inverse models forms a promising basis for ongoing research in control and optimization of underactuated multibody systems, especially modern machine tools in light-weight design.