Institute of Engineering and Computational Mechanics
Flexible Multibody Systems
Project Description
Many technical systems are calculated and optimized in digital processes. This procedure saves numbers of costly experiments and prototypes. In the simulation process it is necessary to describe the technical properties accurate with regard to the demands and the computational time. The description of the dynamical behavior of mechanical systems as a flexible multibody system is state of the art in many different applications, like robotics, car and powertrain developments or the analysis of machines. If the deformations of the elastic body are small and linear, the systems are called elastic multibody systems.
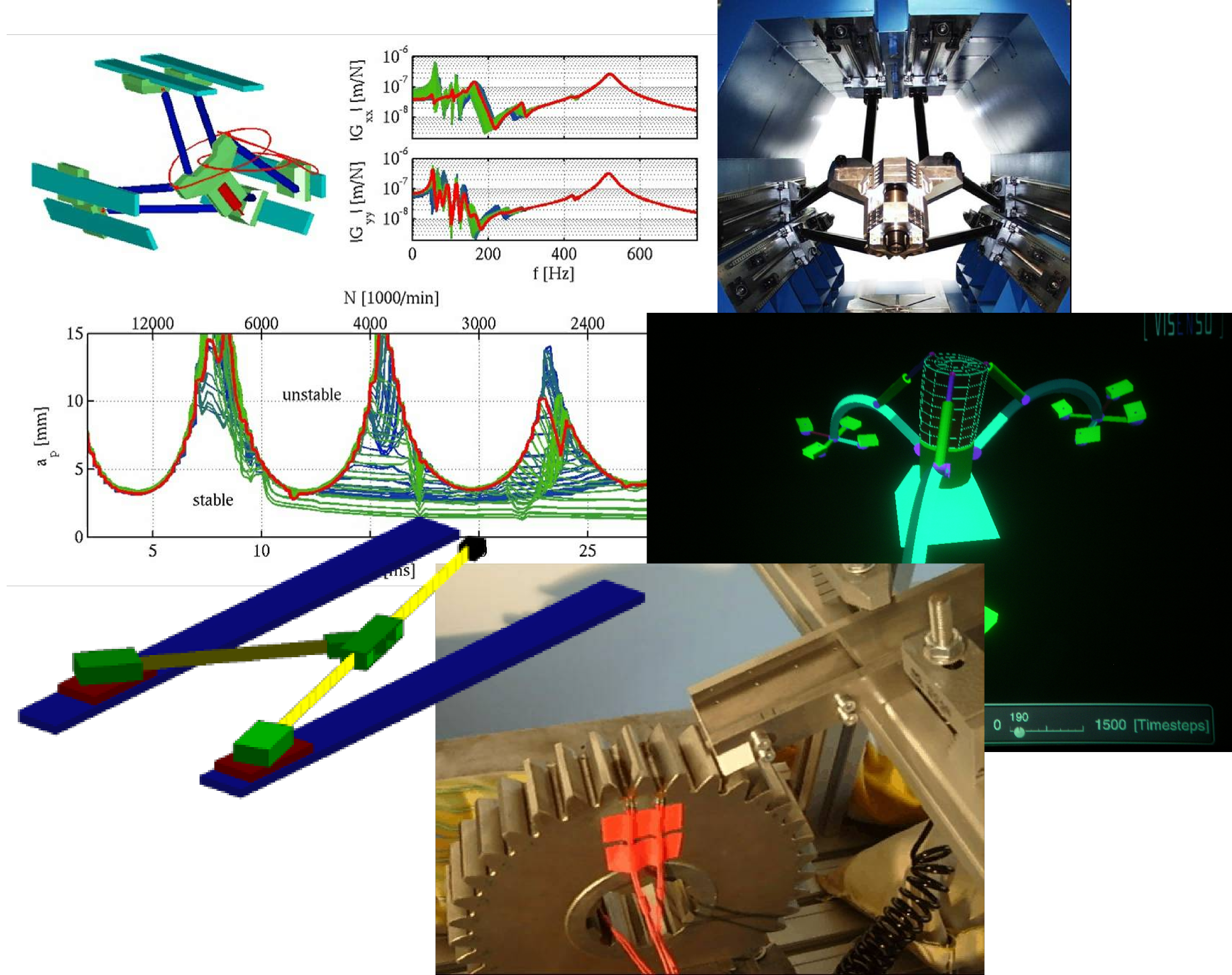
Picture 1: examples of techn. systems
Elements of classical multibody systems are rigid bodies, which are interconnected by ideal
joints and constraint elements between each other and the surrounding environment. With respect to the
increasing usage of lightweight structures and increasing working speeds, the negligibility of elastic effects is no
longer appropriate this leads to unrealistic simulation results.
Flexible multibody dynamics is the subject dealing with the modeling and analysis of constrained flexible bodies that undergo large displacements, including large rotation. The large displacement includes rigid body motion as well as elastic deformations. The research effort in this area have led to many concepts and approaches that's used in a wide range of flexible multibody applications
finite segment methode
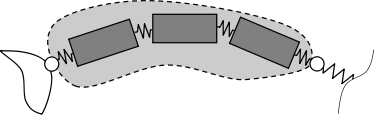
In the finite segment approch, the flexible body is modeled out of a set of rigid bodies which are connected by springs and/or dampers.
Picture 2: finite segments
finite elemente formulation for large deformations
incremental method
large rotation vector method
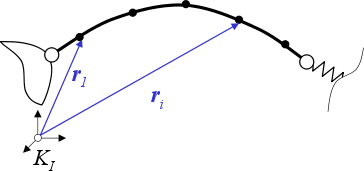
absolute nodal coordinate formulation
This method is especially well suited for systems with large deformations.
Picture 3: absolute Knotennode formulation
floating frame of reference formulation
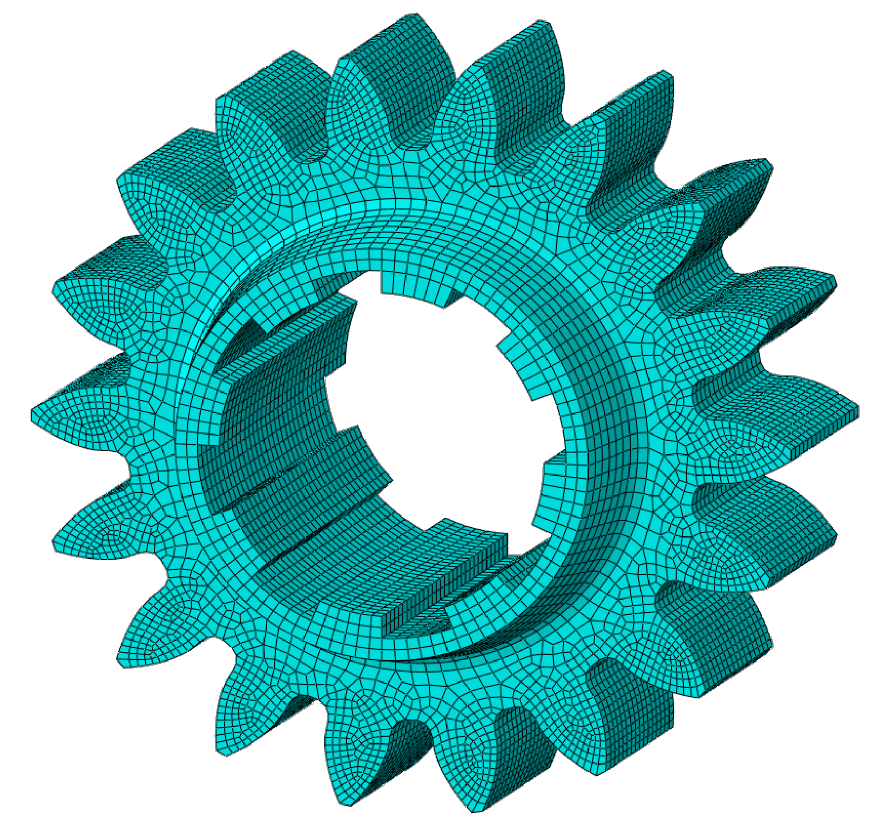
For systems where the elastic deformation is small compared to the rigid body motion, the floating frame of reference formulation is a sensible choice and included in commercial tools like SIMPACK, MSC ADAMS und LMS Virtual Lab. In this formulation the motion of a flexible body is separated into a usually non-linear motion of the
reference frame and a linear elastic deformation with respect to this reference frame. The small elastic deformations are described with the linear finite element method and represented by a second order differential equation. To improve the simulation process the model order reduction helps to reduce the large number of degrees of freedom.
Picture 4: meshed gear
Field of Research
In various research works different aspects of the simulation process of elastic multibody systems are considered or applied on technical and industrial problems.
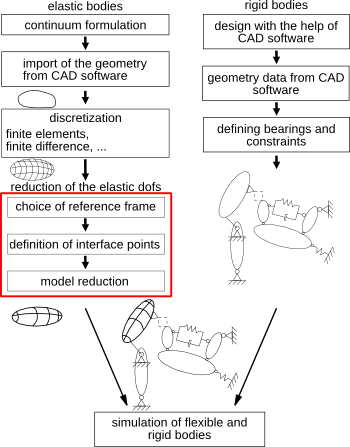
Picture 5: Preprocessing for the simulation of a flexible multibody system
Formulation methods of FE data:
The first modelling of the elasticity is a crucial step in the simulation
process of elastic bodies. A careful selection of suitable elements and
meshing grade is necessary because wrong element formulations and meshing
grades distort the simulation results.
Model reduction in elastic multibody systems
The spatial discretization within FE programs usually leads to high
number of elastic degrees of freedom. As a consequence transient
simulations, endurance test or design problems of such huge systems are not
feasible. Because of this, it is necessary to reduce the flexible degrees of
freedom by suitable reduction methods.
Instead of using the state of the art reduction method, the modal reduction, Krylov-subspace and Gramian matrix based methods are developed and used. The decreased number of elastic degrees of freedom leads to a speedup of the simulation
without distracting the elastic behaviour of the bodies.
Parametric Model Reduction of Elastic Multibody Systems
In an increasing number of applications (simulation of moving loads in EMBS) the system matrices cannot be considered as constant and the description of parameter dependent systems is meaningful. These models are reduced with different parametric reduction methods by retaining the structure and parameter dependency.
Simulation of flexible multibody system
A lot of different possibilities to simulate elastic multibody systems are available. On the one hand commercial programs, like SIMPACK, can be used. On the other hand the user can simulate the multibody systems with the software package Neweul-M², which is developed at the Institute.
Dynamic Simulation of Elastic Gears
Complete gear trains can be modeled with elastic bodies and analyzed dynamically using novel computational methods.