 |
|
 |
Institut für Technische und Numerische Mechanik |
|
Modellierung und Vorsteuerungsentwurf für flexible Mehrkörpersysteme mit Umgebungskontakt |
 |
|
|
|
|
 Forschung Forschung
|
|
|
|
Projektbeschreibung
|

|
|
Abbildung 1: Cooperative Control of Multiple Mobile Robots
|
In den letzten Jahren hat die kooperative Steuerung von mobilen Multi-Roboter-Systemen zunehmend an Interesse gewonnen. Dabei werden mehrere mobile Roboter verwendet, um eine komplexe Aufgabe gemeinsam zu lösen. In diesem Forschungsprojekt wird der gemeinsame Transport von großen Objekten in einer eingeschränkten Umgebung angestrebt.
Auf der lokalen Roboterebene wird hierzu ein Regelungsgesetz entwickelt, um die einzelnen Bewegungen der Roboter effektiv zu steuern und eine Koordination mit einer übergeordneten, globalen Regelstrategie zu ermöglichen. Die einzelnen Roboter des Systems kommunizieren dabei miteinander über Kommunikationstopologien, welche auf verschiedene übergeordnete Regelstrategien angepasst werden können. Der gewünschte Transport von Objekten mit einer Vielzahl individueller mobiler Roboter erfordert auch, dass einzelne Roboter mit der Umgebung interagieren und nicht vorhersehbare Hindernisse, Vorkommnisse und Störungen bewältigen.
Hauptziele
- Mit diesem Projekt sollen modernen Regelstrategien für kooperative mobile Roboter zum Lasttransport untersucht, entwickelt und implementiert werden.
- Zur Aufgabenerfüllung wird eine adaptive Lasttrageeinheit für die einzelnen Roboter entworfen.
- Auf der Ebene der einzelnen Roboter sind folgende Punkte von Interesse: beschränkte Aktordynamik der Roboter, Sensor- und Aktorzuverlässigkeit, Kommunikationsschnittstellen und Kommunikationszuverlässigkeit zwischen den Robotern.
- Auf der übergeordneten Ebene sind folgende Punkte von Interesse: Steuerbarkeit der Gesamtgruppe, Stabilität des Gesamtsystems, Zuverlässigkeit bei Ausfall einzelner Roboter oder der Kommunikation.
|
|
|
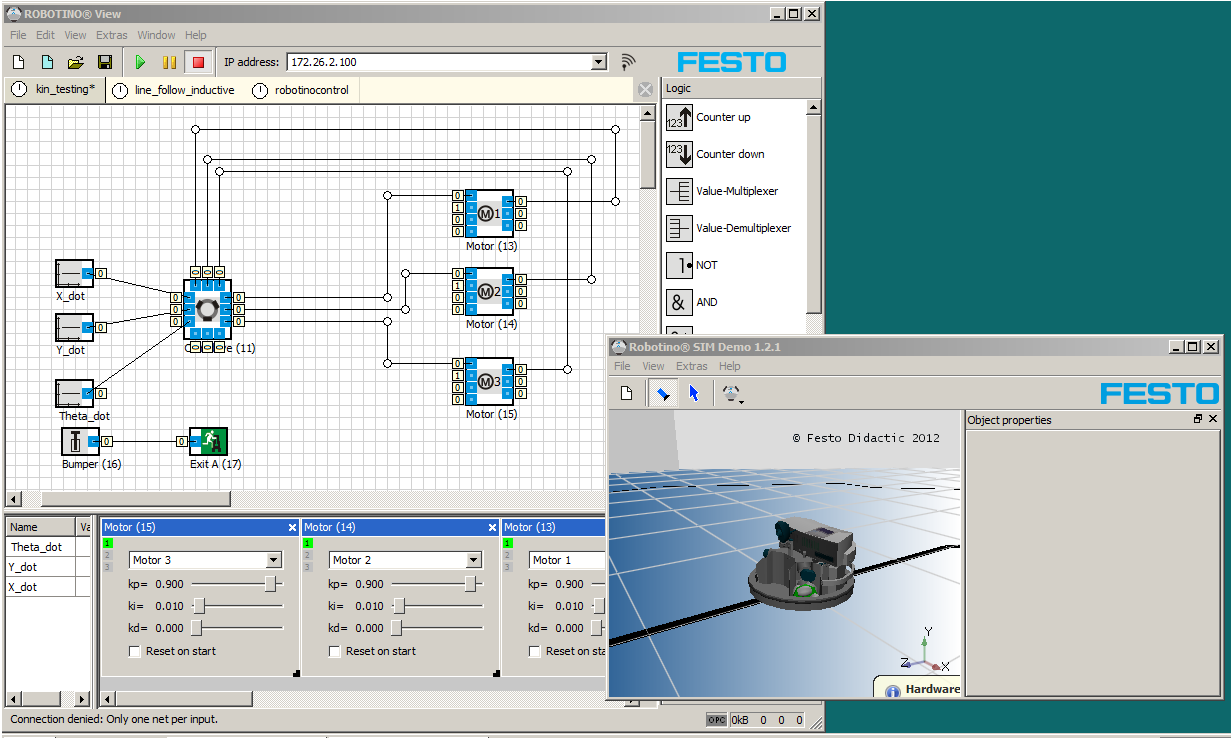
Abbildung 2: Robotino View Software.
|
Hardware und Software
Verschiedene Software-APIs stehen zur Verfügung, welche auf den Robotino implementiert werden können. Daraus ergeben sich eine gute Flexibilität für die Umsetzung der Regelgesetze und die Möglichkeit zur Einbindung von on-board Sensoren der Robotinos sowie zusützlicher Sensoren/Aktoren der entwickelten Lasttrageeinheit.
Die verwendeten Software-APIs sind unter anderem MATLAB, Lab-VIEW, C + +, EA09 Real Time-Tools.
Ansprechpartner
|
|
|
|
|