Die Dynamik der meisten mechanischen Systeme ist geprägt durch nicht vernachlässigbare Nichtlinearitäten.
In den meisten Fällen beispielsweise ist die Kinematik des Systems hochgradig nichtlinear, so dass die Vorgabe der
Bewegungen solcher Mechanismen den Umgang mit stark verkoppelten und strukturell komplexen Differentialgleichungen erfordert.
Dabei sind insbesondere die unteraktuierten Mehrkörpersysteme von großem Interesse, die sich durch eine geringere Anzahl
von Aktoren als Freiheitsgrade auszeichnen. Flexible Mehrkörpersysteme sind eine wichtige
Klasse unteraktuierter Systeme. Diese gewinnen im Zuge der Leichtbauweise von Robotern oder Werkzeugmaschinen in der Industrie zunehmend an Bedeutung.
Die Regelung flexibler Mehrkörpersysteme stellt eine große Herausforderung dar. In diesem Projekt wird ein modellprädiktiver Ansatz zur Regelung
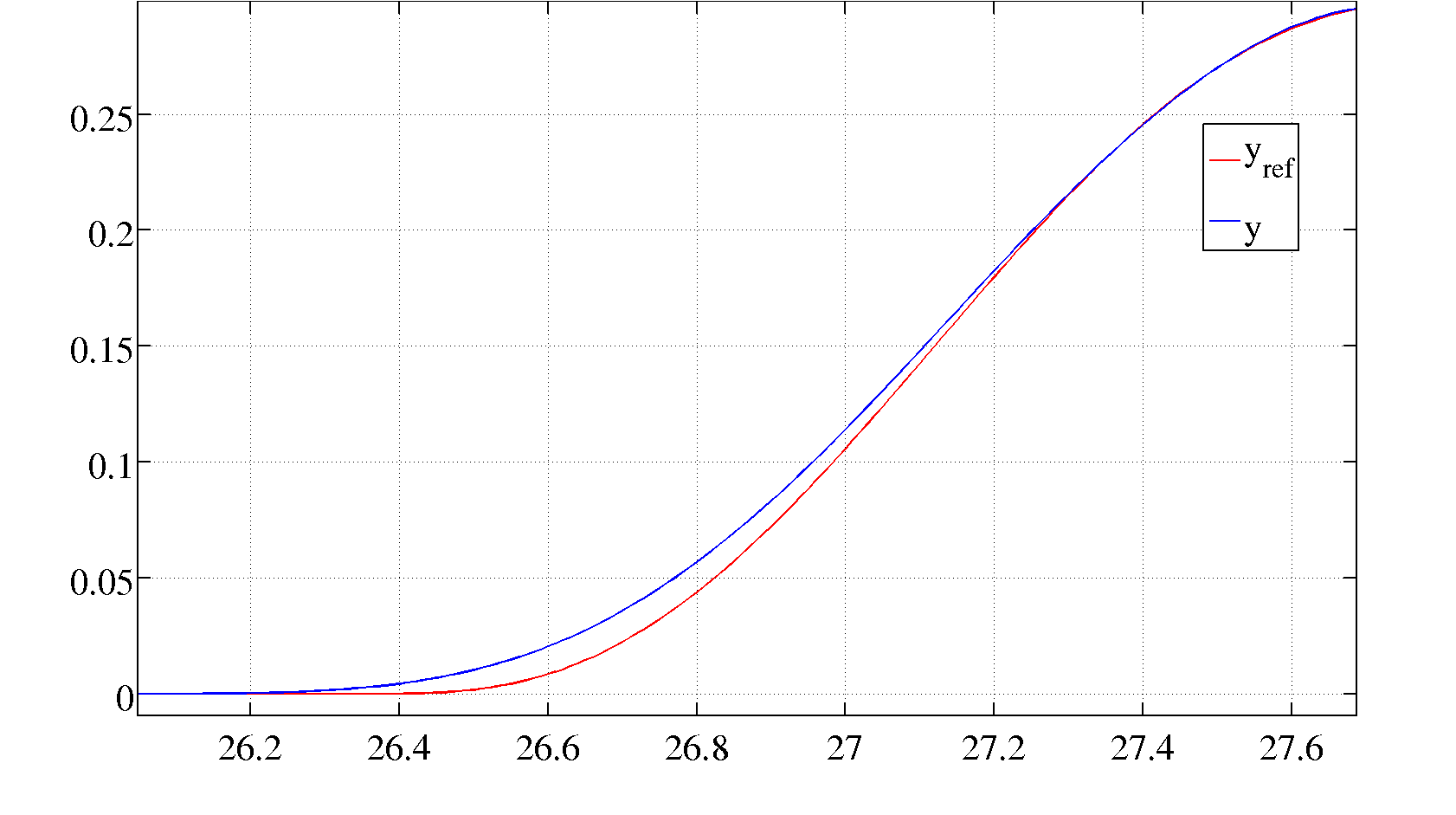
solcher Systeme untersucht. Im Fokus steht dabei einerseits die Genauigkeit beim Abfahren einer vorgegebenen Trajektorie. Andererseits spielt, im Hinblick
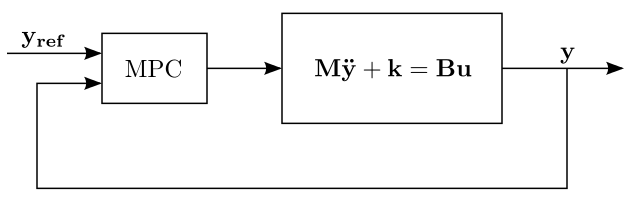
auf eine technische Realisierung, die echtzeitfähige Optimierung eine große Rolle. Die modellprädiktive Regelung (MPC)
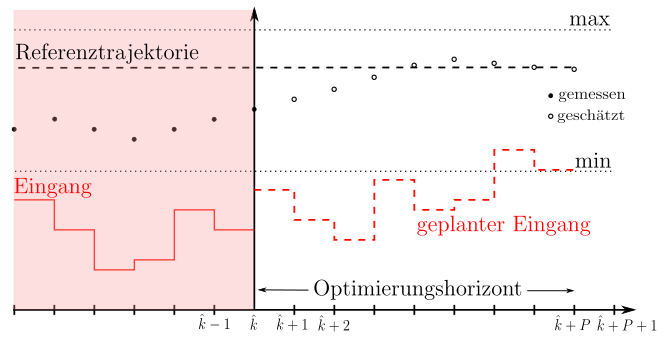
basiert auf der fortwährenden Lösung eines Optimalsteuerungsproblems über einen mitbewegten Zeithorizont. Grundlage der Optimierung ist ein
Gütekriterium, welches typischerweise Abweichungen der Ausgangs- von den Referenzgrößen und Stellgrößenänderungen bewertet.
Mechanische Beschränkungen wie z.B. Bauraum oder Aktorgeschwindigkeiten werden hierbei im Optimierungsalgorithmus berücksichtigt.
Weitere Vorteile liegen in dem vorausschauenden Charakter der Regelung, wodurch Stellgrößen wesentlich intelligenter auf das System geschaltet werden können.