Institute of Engineering and Computational Mechanics
Model Predictive Control of
Flexible Multibody Systems
Project Description
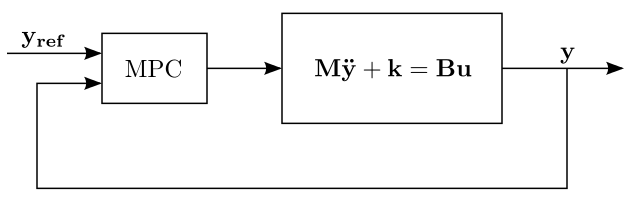
Figure 1:
Control structure
The dynamics of most mechanical systems is characterized by nonlinearities which cannot be neglected. In most cases the kinematics of the systems is highly nonlinear.
This is the reason why for control problems you have to cope with strongly influenced and structural complex differential equations. Especially, the underactuated
multibody systems are of great interest, which are characterized by possessing less actuators than degrees of freedom.
Flexible multibody systems are an important class of underactuated systems. Due to light constructions of roboters and
machine tools these systems are becoming more important in industries.
The control of flexible multibody systems represents a big challenge due to the fast dynamics of the flexible modes. In this project a model predictive approach
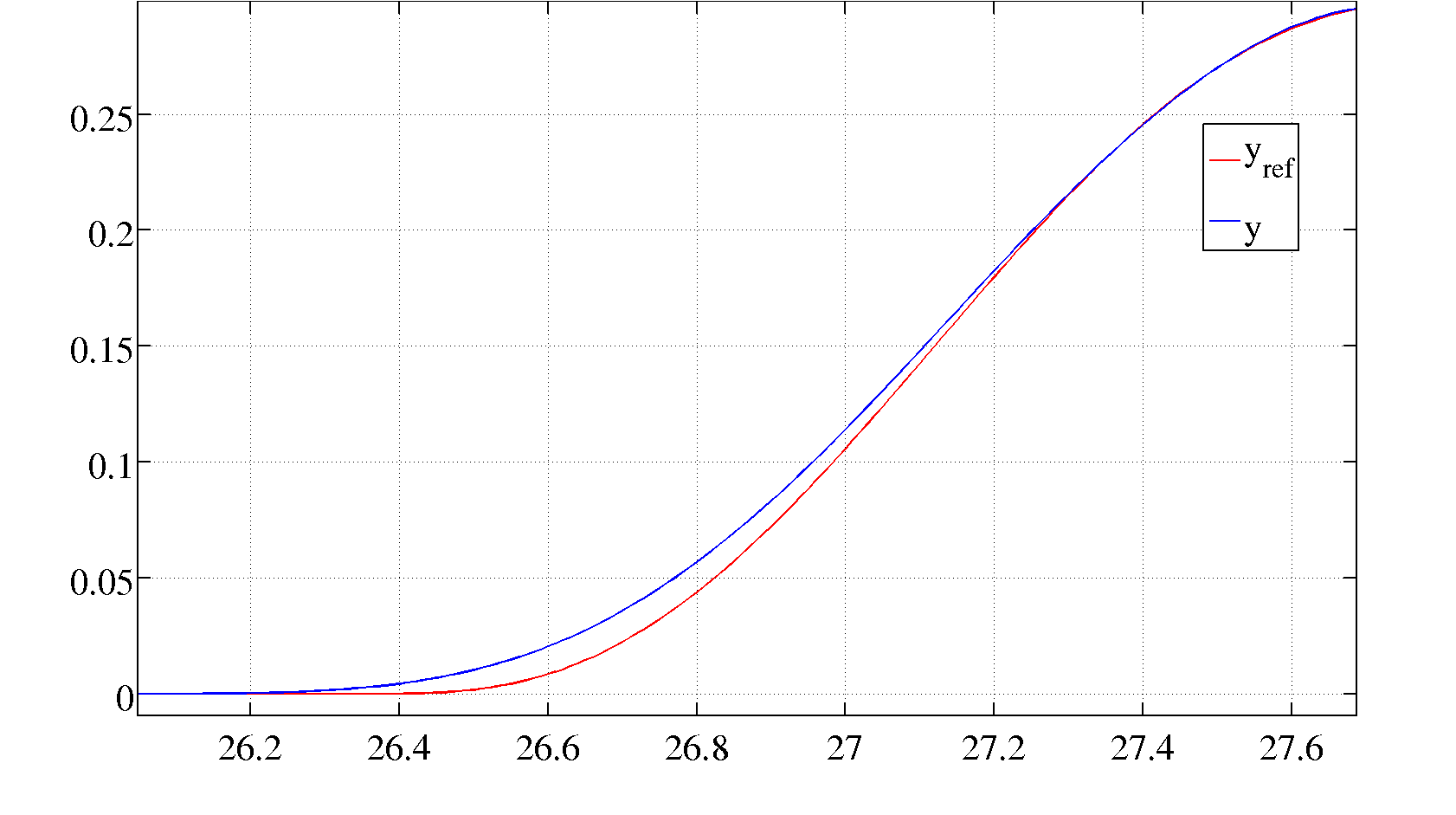
to control such systems is evaluated. On the one hand, the focus lies on an accurate tracking control. On the other hand, the realtime optimization plays an important
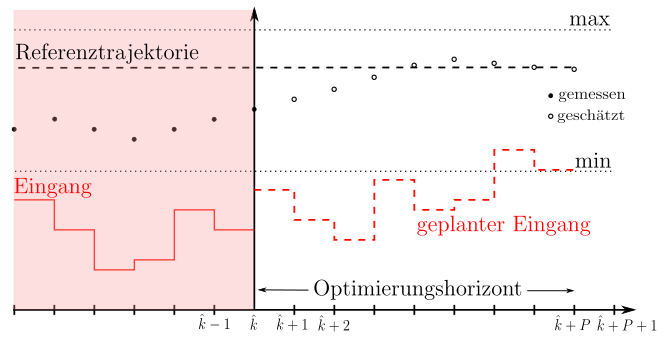
role with regard to a technical realization. Model predictive control (MPC) is based on a continual solution of an optimal control problem over a receding horizon.
The fundament of optimization is a criterion, which typically penalizes the deviations of the control from the reference variables and the rate of the manipulated variables.
Furthermore mechanical constraints like installation space or actuator velocities are regarded in the optimization algorithm.
Another advantage of MPC is the anticipatory character, which provides a more intelligent control.