 |
|
Ehsan Sharafian, Dr.-Ing. (2015 - 2018)
|
Forschungsgebiet
- Modellierung und Regelung von Mehrkörpersystemen
- Verteilte Regelung von mobilen Schwarmrobotern
- kooperative Bewegung und Lageregelung von mobilen Schwarmrobotern
- Untersuchung zu einem neuen Optimierungsalgorithmus, der von Bakterienpopulation inspiriert wurde
|
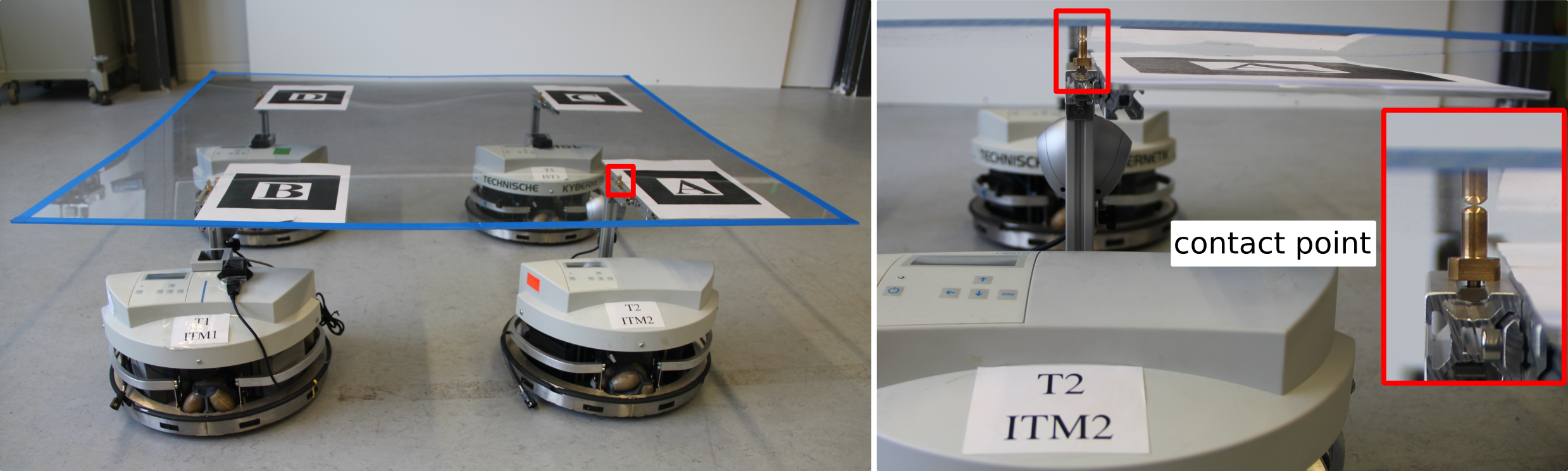
Transporting an elastic plate using mobile robots purely by normal and friction forces. The absence
of a rigid connection gives the robots the ability to move and stick or slip under the plate. |
|
|
|
Transporting an elastic plate through a narrow passage
where only one mobile robot can pass at a time. | Simulation result with five robots. |
Publikationen
schwarz: veröffentlicht, grün: zur Veröffentlichung angenommen, rot: zur Veröffentlichung eingereicht
-
Sharafian Ardakani, E., Ebel, H., Eberhard, P.:
Study on the Cooperative Transportation of a Load using Swarm Robots. Proceedings IMSD, 5th Joint International Conference on Multibody System Dynamics, Lisboa, Portugal, June 24-28, 2018.
-
Sharafian Ardakani, E., Eberhard, P.:
Robotino Localization. Institutsbericht IB-60, Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017. (12 pages)
-
Ebel, H., Sharafian Ardakani, E., Eberhard, P.:
Comparison of Distributed Model Predictive Control Approaches for Transporting a Load by a Formation of Mobile Robots. Proceedings of the 8th ECCOMAS Thematic Conference on Multibody Dynamics, Prague, June 19-22, 2017.
-
Sharafian Ardakani, E., Ebel, H., Eberhard, P.:
Transporting an Elastic Plate Using a Group of Swarm Mobile Robots. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, July 3-7, 2017.doi:10.1109/AIM.2017.8014213
-
Ebel, H., Sharafian Ardakani, E., Eberhard, P.:
Distributed Model Predictive Formation Control with Discretization-Free Path Planning for Transporting a Load. Robotics and Autonomous Systems, Vol. 96, pp. 211-223, October 2017. doi:10.1016/j.robot.2017.07.007
-
Sharafian Ardakani, E., Eberhard, P.:
Transporting a Load by a Group of Swarm Mobile Robots. Institutsbericht IB-59, Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2016. (19 pages)
-
Sharafian Ardakani, E., Eberhard, P.:
Cooperative Search by Swarm Robots Based on Bacterial Foraging Optimization. In Proceedings of the 24th Annual International Conference on Mechanical Engineering (ISME), 2016.
-
Sharafian Ardakani, E., Eberhard, P.:
Bacterial Foraging Optimization via Stigmergy Method. Institutsbericht IB-58, Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2015. (18 pages)
-
Sharafian Ardakani, E., Tale Masouleh, M., Ghaffari, A.:
Environment and Objects Detection Using E-puck Robot. In Proceedings of ECCOMAS Multibody Dynamics 2013, University of Zagreb, Croatia, 2013.
-
Sharafian Ardakani, E., Tale Masouleh, M., Ghaffari, A., Ansari Eshlaghi, F.:
Objects Detection and Localization in an Unknown Environment Using Image Processing and Artificial Neural Networks. In Proceedings of the 22th Annual International Conference on Mechanical Engineering (ISME), 2014.
-
Sharafian Ardakani, E., Ansari Eshlaghi, F., Daneshmand, M., Tale Masouleh, M., Menhaj, M.B., Ghaffari, A.:
Path Planning and Obstacle Avoidance of Mobile Robots via Potential Field Based on Fuzzy Controlling. In Proceedings of the 13th Iranian Conference on Fuzzy Systems (IFSC), 2013.
Poster-Präsentationen
-
Sharafian Ardakani, E., Eberhard, P.:
4. Oktober 2017, SimTech Statusseminar, Bad Boll, "Vision Based Indoor Localization of Mobile Robots"
-
Sharafian Ardakani, E., Eberhard, P.:
25. November 2016, SimTech Statusseminar, Bad Boll, "Transporting a Load Using Swarm Robots"
-
Sharafian Ardakani, E., Eberhard, P.:
25. November 2015, SimTech Statusseminar, Bad Boll, "Distributed Control of Swarm Robots Using Ideas from Bacteria Populations"
Vorträge
-
26. Juni 2018: 5th Joint International Conference on Multibody System Dynamics (IMSD2018), Lisboa, Portugal, "An Experimental Study on the Cooperative Transportation of a Load using Swarm Robots"
-
28. Mai 2018: Statusseminar ITM, Bad Herrenalb, Deutschland, "Cooperative Transportation of a Load Using Swarm Robots based on ALPSO"
-
06. Juli 2017: International Conference on Advanced Intelligent Mechatronics (AIM 2017), München, Deutschland, "Transporting an Elastic Plate Using a Group of Swarm Mobile Robots"
-
22. Mai 2017: Statusseminar ITM, Monbachtal, Deutschland, "Localization of Robotino"
-
28. Juni 2016: Statusseminar ITM, Monbachtal, Deutschland, "Transporting a Load by a Group of Mobile Robots"
-
07. Mai 2016: Center of Excellence in Design, Robotics, and Automation (CEDRA), Sharif University of Technology, Tehran ,Iran, "Design of a Dynamic Model of Transporting a Load by a Swarm Mobile Robots"
-
27. April 2016: The 24th Annual International Conference on Mechanical Engineering (ISME 2016), Yazd, Iran "Cooperative Search by Swarm Robots Based on Bacterial Foraging Optimization"
-
27. November 2015: The 8th SimTech Statusseminar, Bad Boll, Duetschland, "Distributed Control of Swarm Robots Using Ideas from Bacteria Populations"
-
11. Juli 2015: SimTech Doktorandenwochenende 2015 , Hirschegg, österreich, "On the Analysis, Simulation and Control of a Swarm of Small Mobile Robots Using Bacteria Foraging Optimization"
-
16. Juni 2015: Statusseminar ITM, Monbachtal, Deutschland, "On the Analysis, Simulation and Control of a Swarm of Small Mobile Robots"
Betreute Arbeiten
- Design and Build of a Quadcopter for Transporting a Load, Studienarbeit.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.(laufend)
- Design and Build of a Quadcopter for Transporting a Load, Studienarbeit SA-16.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
- Trajektorienplanung und Folgeregelung für einen Quadrokopter in unbekannter, dynamischer Umgebung, Studienarbeit STUD-481.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
Betreuung gemeinsam mit Henrik Ebel, M.Sc.
- Implementierung und Analyse von auf stochastischem Sampling basierender modellprädiktiver Regelung für die Regelung nichtlinearer mechanischer Systeme, Studienarbeit STUD-479.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
Betreuung gemeinsam mit Henrik Ebel, M.Sc.
- Modellbildung, Parameteridentifikation und Modellvalidierung für einen Quadrokopter, SimTech-Projektarbeit.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
(laufend)
Betreuung gemeinsam mit Henrik Ebel, M.Sc.
- Modeling, Simulation and Build a Quadcopter, Studienarbeit SA-14.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
- Tracking and Following an Object Using Robotinos, Bachelorarbeit BSC-77.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
- Formation Control of Mobile Robots Using Results from Algebraic Graph Theory, Masterarbeit MSC-254.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
Betreuung gemeinsam mit Henrik Ebel, M.Sc.
- Attitude and Motion Control of an Elastic Plate Transported by a Formation of Mobile Robots, Studienarbeit STUD-473.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2017.
Betreuung gemeinsam mit Henrik Ebel, M.Sc.
- Model Predictive Formation Control of Swarm Mobile Robots for Transporting a Load, Masterarbeit MSC-239.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2016.
- Designing a Dynamic Model and Simulation of Transporting a Load by a Group of Swarm Mobile Robots, Bachelorarbeit BSC-64.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2016.
- Swarm Formation Control by Virtual Structure Method for Transporting a Load, Bachelorarbeit BSC-80.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2016.
Lehre
Sonstige Institutsaufgaben
|
|

