 |
|
 |
Institute of Engineering and Computational Mechanics |
|
Cooperative Control of Multiple Mobile Robots for Load Transportation |
 |
|
|
|
|
 Research Research
|
|
|
|
Project Description
|

|
|
Figure 1: Cooperative Control of Multiple Mobile Robots
|
In the recent years the problem of cooperative control of multi robot systems is gaining an increasing interest. Thereby several robots are used to accomplish together a complex task. In this research transporting large objects in a limited environment is aspired. At the individual robot level a proper control law is developed in order to cope with the individual actions and to perform the required tasks in addition to dealing with a higher level control law that coordinates the overall task of the system.
Individual members of the system are required to communicate through various communication topologies that could also follow a certain control law. The overall action of the system requires the individual member to interact with the surrounding and to deal with unforeseen events that could arise at any instant of time.
Main Goals
- This project is intended to focus thoroughly on studying, development and implementation of modern
control theory to the omni-directional drive mobile robots.
- The main issue of the robot design is the development and the addition of suitable load carry
device for each robot.
- The main issues of interest for the control action on the individual level are: actuator limitations,
communication and interfaces between members, sensors accuracy and reliability, failure of individual
member and the mechanical structure.
- The main issues of interest on the group level are: the group cooperative controllability, the overall
group bandwidth and the cooperative stability.
|
|
|
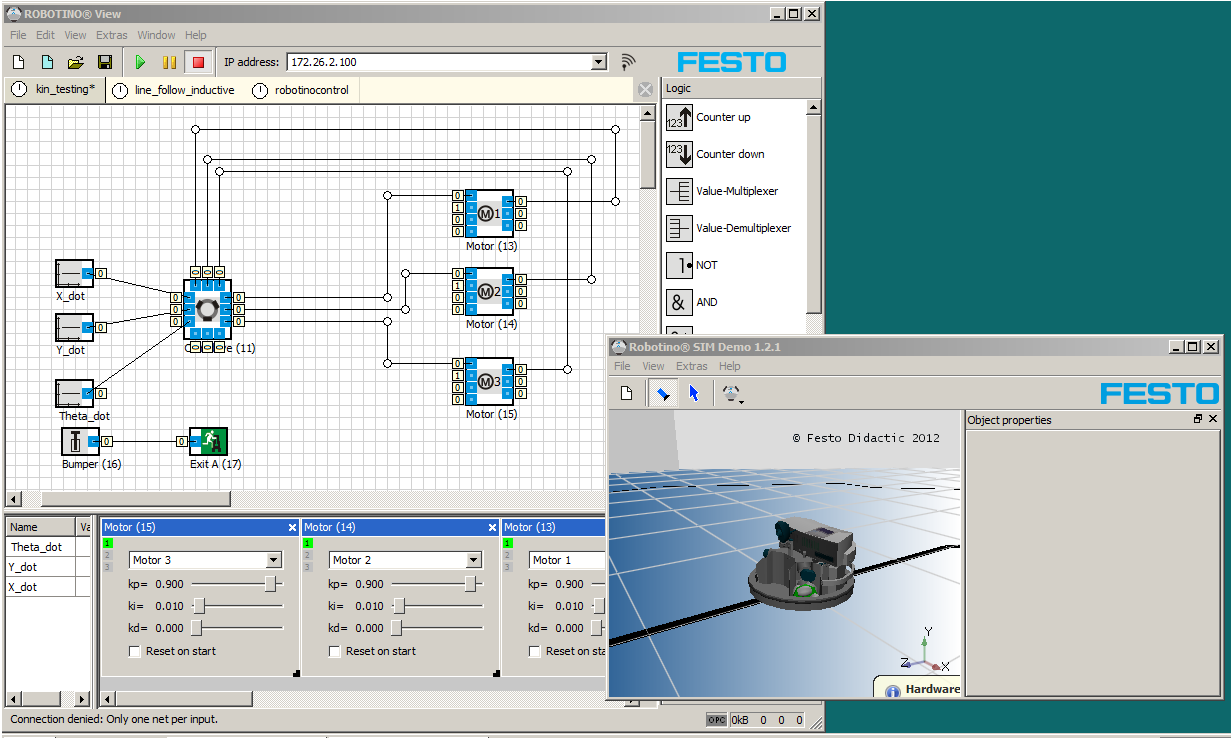
Figure 2: Robotino View Software
|
Hardware
Implementation is tested on the omni-directional drive mobile robot of FESTO, Robotino. The
main task is to perform a cooperative control action between several mobile robots to move large
objects, thus cooperative optimal path planning and obstacle avoidance must be performed.
Software
There are several software APIs which can
be implemented on Robotino. This gives a
good flexibility for the implementation of the
designed control laws and in dealing with
the various sensors on board Robotino.
These software APIs include MATLAB, Lab-
VIEW , C++ , EA09 real time tools and others.
Contact
|
|
|
|
|