 |
|
Project Description
|
|
|
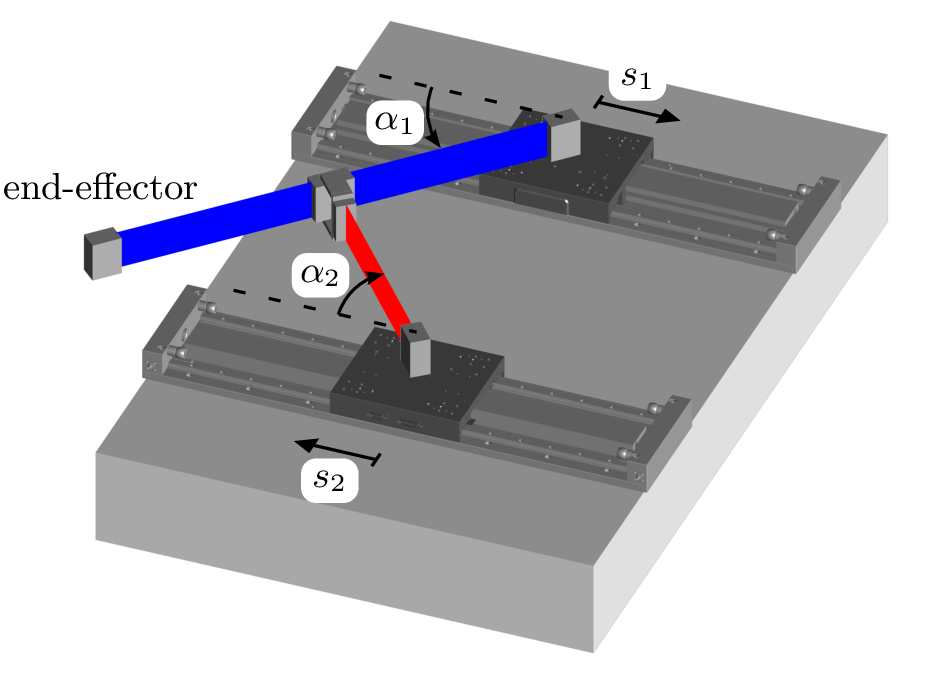
Figure 1:
Flexible multibody system with kinematic loop.
|
With growing demands on energy efficiency and high movement speeds light-weight
machine tools and manipulators become more and more important. This results in a tremendous decrease of the overall
stiffness of such machine tools. In order to compensate for the arising
deformations, modern, model-based control methods have to be
applied. Especially feed-forward control methods like exact model inversion promise
best possible system responses without affecting the stability properties of the
system. Together with simple feedback control methods, high-precision trajectory
tracking and set point changes can be realised.
This concept requires a preferably precise model of the machine tool. Due to the
large working motion, which is superposed by elastic deformations, it seems
likely to model such machines as a flexible multibody systems. This
extension of the classical multibody system allows the consideration of elastic
bodies which undergo a large, nonlinear motion.
In this project focuses on modeling and control design of flexible multibody
systems with environmental contact. In the first instance, the
integration of flexible machine parts into the multibody system is supposed to
be investigated. The usage of finite element models, which have a huge amount
of degrees of freedom, is neither feasible nor desirable. In order to keep the
complexity on a low lewel, the FE models are transformed via modern model
reduction techniques into models with a significantly smaller number of degrees
of freedom. Therfore, the choice of the used shape functions has a wide
influence on the approximation quality and on the computational time of the
overall system. The floating frame of reference approach is used to include these
reduced bodies in the flexible multibody system.
These models allow model-based feed-forward control designs, which offer the
possibility to realize trajectory tracking. A closer attention is payed to
exact model inversion. Exact model inversion implies in this context, that all
dynamical effects of the model are taken into account. Therefore, the model
undergoes a nonlinear coordinate transformation leading to the so-called
Input-Output-Normal form, which, in case of a nonflat system, consists of a set
of differentiators, an algebraic part and the so-called internal dynamics.
Depending on the stability of the internal dynamics, the according feed-forward
control can be computed.
Related Pages
Contact
|
|
