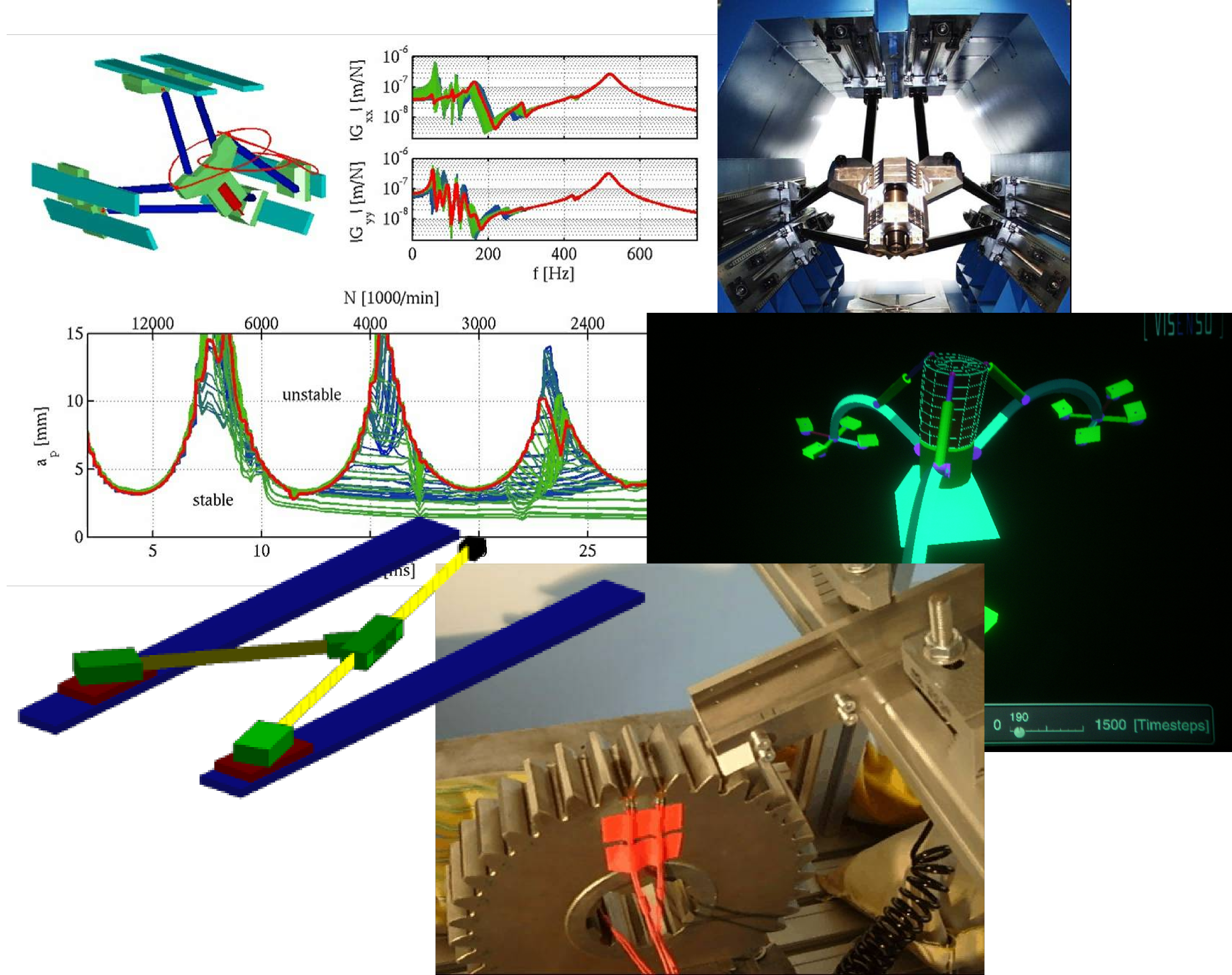
Viele technische Systeme werden zunehmend durch digitale Prozesse abgesichert und optimiert. Dies erspart eine Vielzahl an aufwändigen und teuren Versuchen und Prototypen. Grundlegend für die Simulation ist eine präzise Beschreibung der technischen Eigenschaften sowie eine effiziente Berechnung in vertretbarer Simulationszeit. Zur Beschreibung mechanischer Systeme ist die Modellierung als flexibles Mehrkörpersystem (FMKS) in vielen technischen Anwendungen wie in der Robotik, Fahrzeug- und Antriebstechnik oder auch bei der Analyse von Maschinen Stand der Technik. Werden die Verformungen des flexiblen Mehrkörpersystems auf linear elastische Verformungen, beschränkt, so spricht man von elastischen Mehrkörpersystem (EMKS).
Bild 1: Beispiele techn. Systeme
Die Elemente eines klassischen Mehrkörpersystems sind starre
Körper, die durch masselose Bindungs- und Koppelelemente untereinander und mit
der Umgebung verbunden sind. Die Beschränkung auf starre unverformbare Körper
ist jedoch im Hinblick auf zunehmenden Leichtbau sowie immer höhere
Arbeitsgeschwindigkeiten oft nicht gerechtfertigt, da eine Vernachlässigung von
elastischen Verformungen der Körper zu unrealistischen Simulationsergebnissen führt.
Die Flexible Mehrkörper Dynamik hingegen beschäftigt sich mit der Modellierung und Analyse von gebundenen und verformbaren Körpern, die großen Verschiebungen einschließlich großen Rotation unterliegen. Die großen Verschiebungen umfassen sowohl die Starrkörperbewegungen als auch die elastischen Deformationen. Die Forschungsbemühungen, diese Effekte zu beschreiben, haben zu einer Vielzahl verschiedener Konzepte und Ansätze geführt
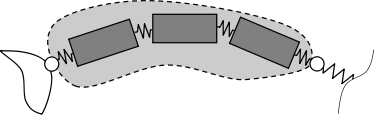
Finite Segmente Methode
Mit dieser Methode wird der verformbare Körper durch einen Satz von starren Körper beschrieben, die über Feder und Dämpfer verbunden sind.
Bild 2: Finite Segmente
Finite Elemente Formulierungen für große Deformationen
Inkrementelle Methode
large rotation vector method
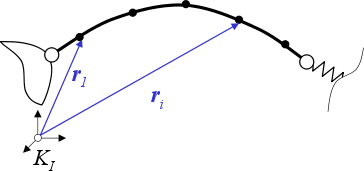
Methode der absoluten Knotenformulierung
Diese Methode ist besonders für Systeme mit großen elastischen Verformungen geeignet. Hierbei werden keine finite Rotationen als Knotenkoordinaten genutzt sondern absolute Verschiebungen und materielle Ableitungen der Knotenkoordinaten. Auf eine Reduktion der Freiheitsgrade wird verzichtet. Somit lassen sich auch nichtlineare Effekte wie große Verformungen oder plastisches Materialverhalten berücksichtigen, was allerdings mit einem sehr hohen zeitlichen Rechenaufwand einhergeht.
Bild 3: Absolute Knotenformulierung
Methode des bewegten Bezugssystems
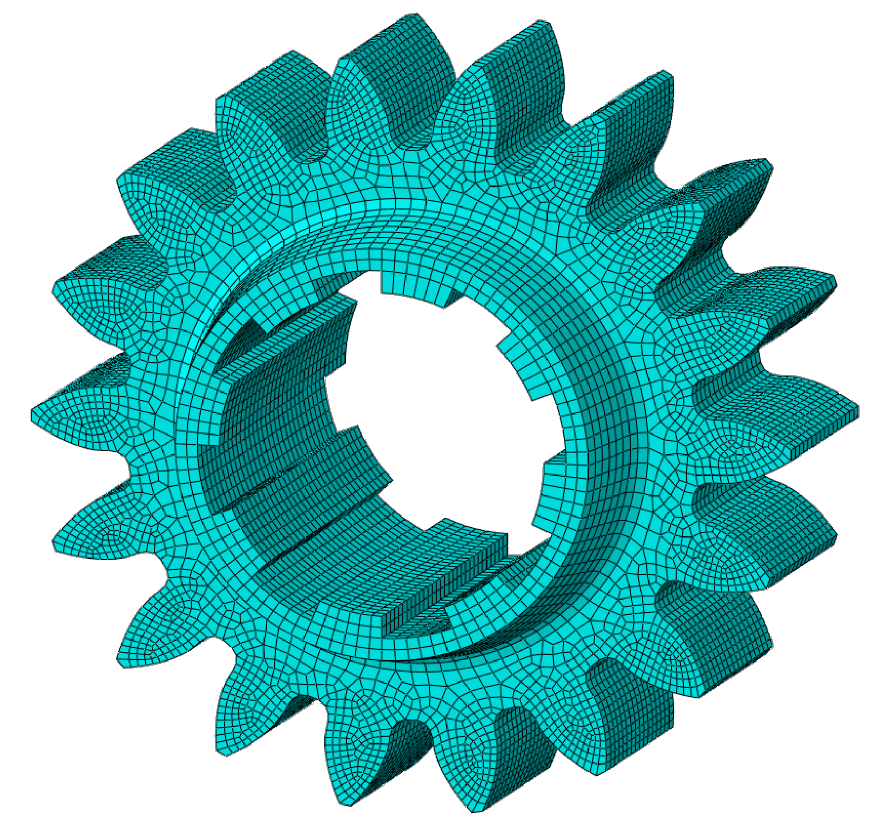
Diese Methode eignet sich besonders für Systeme bei denen die elastischen Verformungen im Vergleich zur Starrkörperbewegung klein sind und wird in kommerziellen Programmen wie SIMPACK, MSC ADAMS und LMS Virtual Lab zur Beschreibung flexibler Körpern verwendet. Die Grundidee besteht darin, die Bewegung des elastischen Körpers in eine große nichtlineare Bewegung des Referenzsystems und eine linearisierte elastische Deformation bezüglich dieses Systems aufzuteilen. Die typischerweise kleinen elastischen Verformungen können mit Hilfe der linearen Finiten Elemente Methode (FEM) angenähert werden und somit durch eine lineare Differentialgleichung zweiter Ordnung beschrieben werden. Aufgrund der resultierenden hohen Anzahl an elastischen Freiheitsgraden kann die Modellreduktion ein entscheidender Schritt bei der effizienten Simulation sein.
Bild 4: vernetztes Zahnrad
Forschungsschwerpunkte
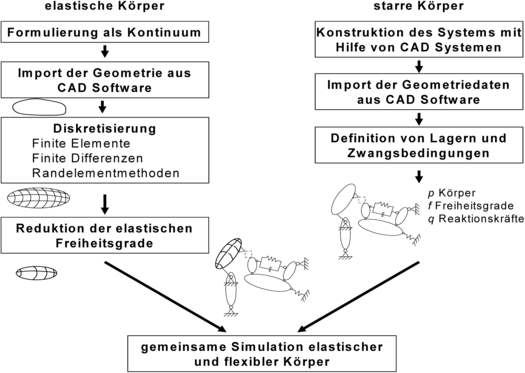
Im Rahmen von verschiedenen Forschungsarbeiten werden Teilaspekte der Prozesskette zur Simulation von flexiblen Mehrkörpersystemen betrachtet oder auf technisch relevante Fragestellungen angewandt.
Bild 5: Prozesskette bei der Simulation von flexiblen Mehrkörpersystem
Formulierungsmethoden für FE Daten
Ein entscheidender Schritt bei der Simulation elastischer Körper ist die Modellierung der Elastizität. Die Auswahl geeigneter Elementformulierungen und des Vernetzungsgrads der FE Modelle sind entscheidende Schritte, bei welchen große Sorgfalt notwendig ist, da sonst die Simulationsergebnisse verfälscht werden.
Modellreduktion in elastischen Mehrkörpersystemen
Die Verwendung der FE Methode zur Diskretisierung von elastischen Körpern führt in der Regel zu einer hohen Anzahl elastischer Freiheitsgrade. Diese kann mit Hilfe geeigneter Reduktionsverfahren verringert werden. Hierbei werden nicht nur die Standardverfahren, wie die modale Reduktion, verwendet, sondern Verfahren basierend auf Krylov-Unterräumen und Gramschen Matrizen entwickelt und eingesetzt. Die reduzierte Zahl elastischer Freiheitsgrade kann zu deutlich geringeren Simulationszeiten führen, ohne dass die elastischen Effekte verfälscht werden.
Parametrische Modellreduktion in elastischen Mehrkörpersystemen
In einer steigenden Anzahl von Anwendungen (Simulation von bewegten Lasten in reduzierten EMKS) können die Systemmatrizen nicht als konstant angenommen werden und die Beschreibung von parameterabhängigen Systemen ist sinnvoll. Diese können struktur- und parametererhaltend mit verschiedenen parametrischen Reduktionsverfahren reduziert werden.
Simulation des flexiblen Mehrkörpersystems
Zur Simulation flexibler Mehrkörpersysteme stehen dem Anwender heutzutage vielfältige Möglichkeiten zur Verfügung. Zum Einen können kommerzielle Programme, wie beispielsweise SIMPACK, genutzt werden. Zum Anderen kann das am Institut entwickelte Softwarepaket Neweul-M² genutzt werden.
Visualization Virtual Reality Anlage
Zur Darstellung des Bewegungsverhaltens eines elastischen Körpers kann eine Virtual Reality Anlage genutzt werden.
Dynamische Simulation elastischer Zahnräder
Mit Hilfe neuartiger Berechnungsmethoden können komplette Rädertriebe durch elastische Körper modelliert und dynamisch untersucht werden.