|
|
Dr.-Ing. Qirong Tang, (2008 - 2014)
|
Forschungsgebiet
 Robotic Hand, Embedded Control Systems Robotic Hand, Embedded Control Systems
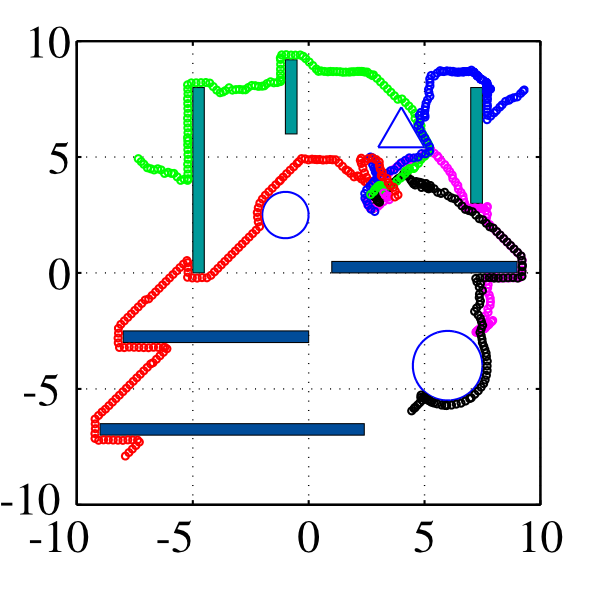
Robots Motion Planning, Formation Control
|
Non-model Based Controls of Robots
Robotic Vehicle
|
Buch (basierend auf der Dissertationsschrift)
Qirong Tang:
- Cooperative Search by Mixed Simulated and Real Robots in a Swarm Based on Mechanical Particle Swarm Optimization. Schriften aus dem Institut für Technische und Numerische Mechanik der Universität Stuttgart, Band 25. Aachen: Shaker Verlag, 2012.
(Online-Bestellung beim Amazon)
Publikationen (Auszug)
schwarz: veröffentlicht, grün: zur Veröffentlichung angenommen, rot: zur Veröffentlichung eingereicht
Qirong Tang:
- Instructions on Robotino and All Its Related Facilities: Hardware and Software. Institutsbericht, IB-57, 48 pages, 2014.
Qirong Tang and Peter Eberhard:
- Cooperative Search by Combining Simulated and Real Robots in a Swarm under the View of Multibody System Dynamics. (Journal) Advances in Mechanical Engineering, Vol.2013, Article ID 284782, Pages 1-11, 2013. [Citation, BibTeX], [Fulltext, PDF]
Qirong Tang and Peter Eberhard:
- Mechanical PSO Aided by Extremum Seeking for Swarm Robots Cooperative Search. In Y. Tan, Y. Shi, and H. Mo, editors, Advances in Swarm Intelligence: Proceedings of the Fourth International Conference on Swarm Intelligence (IC-SI'2013), June 12-15, 2013, Harbin, China. Collected in Lecture Notes in Computer Science, Vol. 7928, Pages 64-71. [Citation, BibTeX], [Fulltext, PDF]
Peter Eberhard and Qirong Tang:
- Sensor Data Fusion for the Localization and Position Control of One Kind of Omnidirectional Mobile Robots. Book Chapter in J. Gerstmayr and H. Gattringer, editors, Multibody System Dynamics, Robotics and Control, pp 45-73. Springer, Wien, 2013. [Citation, BibTeX], [Fulltext, PDF]
Qirong Tang and Peter Eberhard:
- Cooperative Motion of Swarm Mobile Robots Based on
Particle Swarm Optimization and Multibody System Dynamics. Journal of Mechanics Based Design of Structures and Machines, Vol.39, No.2, Pages 179-193, 2011. [Citation, BibTeX], [Fulltext, PDF]
Peter Eberhard and Qirong Tang:
- Research on Cooperative Motion of Swarm Mobile Robots Based on
PSO and Multibody System Dynamics. Abstract paper for: EUROMECH
Colloquium 515: Advanced Application and Perspectives of Multibody
System Dynamics, July 13-16, 2010, Blagoevgrad, Bulgaria. Pages 4-5. [Citation, BibTeX], [Fulltext, PDF]
Hai Huang, Li Jiang, Youngjie Pang, Shicai Shi, Qirong Tang, Dapeng Yang, and Hong Liu:
- Observer-based Dynamic Control of an Underactuated Hand. Journal of Advanced Robotics, Vol.24, No.1-2, Pages 123-137, 2010. [Citation, BibTeX], [Fulltext, PDF]
Peter Eberhard and Qirong Tang:
- Particle Swarm Optimization Used for Mechanism Design and Guidance of Swarm Mobile Robots. Book Chapter in: Particle Swarm Optimization: Theory,Techniques, and Applications by A.E. Olsson (Ed.). Pages 193-225, Nova SciencePublishers, New York, 2011. [Citation, BibTeX], [Fulltext, PDF]
Qirong Tang and Peter Eberhard:
- Modeling and Motion Planning for a Population of Mobile
Robots. In Proceedings of the 18th CISM-IFToMM Symposium on Robot
Design, Dynamics, and Control (RoManSy 2010), July 5-8, 2010, Udine, Italy. Springer 2010, Pages 409-416. [Citation, BibTeX], [Fulltext, PDF]
Qirong Tang and Peter Eberhard:
- A PSO-based Algorithm Designed for a Swarm of Mobile Robots. Journal of Structural and Multidisciplinary Optimization, Vol.44, No.4, Pages 483-498, 2011. [Citation, BibTeX], [Fulltext, PDF]
Qirong Tang, Li Jiang, and Hong Liu:
- Research on Power Management System of Multi-DOF and EMG Based Prosthetic Hand. Machinery & Electronics, Vol.187, Pages 55-58, 2008.
Qirong Tang, Li Jiang, Nan Li, Dapeng Yang, and Hong Liu:
- Mechanism Research of Sensory Feedback for Prosthetic Hand. Transducer and Microsystem Technologies, Vol.27, No.8, Pages 72-75, 2008.
Qirong Tang and Mingjun Chen:
- Finite Element Analysis of Mechanical Properties on the Hemispherical Resonator Gyro and Structure Optimization. In Collection: University's Outstanding Thesis. Harbin Institute of Technology, 2006. Pages 102-107.
Qirong Tang:
- Development of an Embedded Controller for Prosthetic Hand Based on Speech and EMG Signals. Master Thesis in Harbin Institute of Technology. (67 Seiten)
Qirong Tang:
- Finite Element Analysis of Mechanical Properties and Structure Optimization for a Hemispherical Resonator Gyro. Bachelor Thesis in Harbin Institute of Technology. (40 Seiten)
Vorträge
July 15, 2014:
- Searching with Mobile Robots in a Swarm.
Talk Given at FVA Work Group Meeting. (Stuttgart, Germany)
June 24, 2014:
- Robots Formation Control.
Statusseminar of Institute of Engineering and Computational Mechanics 2014. (Bad Liebenzell, Germany)
December 5, 2013:
- From Swarm Search to Swarm Formation.
Project talk given at the 6th SimTech Status Seminar. (Bad Boll, Germany)
June 18, 2013:
- A Robot Group Mixed with Simulated and Real Robots for Cooperative Search.
Talk given at the College of Mechatronics, Harbin Institute of Technology, within the 'Chunhui' Program Supported by the Ministry of Education of P.R. China, (Harbin, China)
June 14, 2013:
- Mechanical PSO Aided by Extremum Seeking for Swarm Robots Cooperative Search.
The Fourth International Conference on Swarm Intelligence (IC-SI'2013), (Harbin, China)
June 11, 2013:
- Liberate Robot Navigation and Positioning.
Statusseminar of Institute of Engineering and Computational Mechanics 2013. (Bad Liebenzell, Germany)
September 27, 2012:
- Cooperative Search by Mixed Simulated and Real Robots in a Swarm Based on Mechanical Particle Swarm Optimization.
Promotionsvortrag, University of Stuttgart, 2012. (Stuttgart, Germany)
July 13, 2012:
- Position Control of Omnidirectional Mobile Robots for Cooperative Search.
Sino-German Ph.D. Students Workshop Held by University of Stuttgart, Tongji University, and Shanghai Jiao Tong University, 2012. (Shanghai, China)
June 12, 2012:
- Some Feelings to the Indoor Mobile Robots Positioning.
Statusseminar of Institute of Engineering and Computational Mechanics 2012. (Bad Liebenzell, Germany)
July 19, 2011:
- The Thief of Time - Research Work and Time Management.
Statusseminar of Institute of Engineering and Computational Mechanics 2011. (Hohenwart, Germany)
October 15, 2010:
- Optimization and Swarm Robots.
Dynamiktag of Institute of
Engineering and Computational Mechanics 2010, University of
Stuttgart. (Stuttgart, Germany)
July 8, 2010:
- Modeling and Motion Planning for a Population of Mobile
Robots.
18th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control (RoManSy 2010), (Udine, Italy)
June 30, 2010:
- Try to Deploy the Algorithm and Mechanism onto Real Robotino Robots.
Statusseminar of Institute of Engineering and Computational Mechanics 2010. (Hohenwart, Germany)
February 11, 2010:
- Research on Cooperative Motion of Swarm Mobile Robots Based on PSO and Multibody Dynamics.
Bilateralnog TEMPUS. (Split, Croatia)
July 7, 2009:
- VL-ALPSO: A Swarm Intelligent Algorithm Designed for Swarm Mobile Robots-Design and Simulation.
Statusseminar of Institute of Engineering and Computational Mechanics 2009. (Hohenwart, Germany)
Poster-Präsentationen
December 4-6, 2013:
- Optimization-based Search Performed by Groups of Mechanical Robots: Part V - Instantialized Experiments (Real²).
Poster at the 6th SimTech Status Seminar. (Bad Boll, Germany)
December 5-7, 2012:
- Optimization-based Search Performed by Groups of Mechanical Robots: Part IV - Verification by Experiments.
Poster at the 5th SimTech Status Seminar. (Bad Boll, Germany)
November 21-23, 2011:
- Optimization-based Search Performed by Groups of Mechanical Robots: Part III - Position Control.
Poster at the 4th SimTech Status Seminar. (Bad Boll, Germany)
June 14-17, 2011:
- A System Level Hybrid Strategy for the Position Control of a Group of Robotino Robots.
International Conference on Simulation Technology 2011 (SimTech 2011). (Stuttgart, Germany)
December 8-10, 2010:
- Optimization-based Search Performed by Groups of Mechanical Robots: Part II - Simulation and Off-line Trajectory Tracking.
Poster at the 3rd SimTech Status Seminar. (Bad Boll, Germany)
December 1-3, 2009:
- Optimization-based Search Performed by Groups of Mechanical Robots: Part I - Modeling.
Poster at the 2nd SimTech Status Seminar. (Bad Herrenalb, Germany)
Betreute Studien- und Diplomarbeiten
schwarz: abgeschlossen, grün: laufend
Weiran Lin:
- Bachelorarbeit (corresponds to Bachelor Thesis).
Building and Controlling of a Wheeled Mobile Robot.
Institute of Engineering and Computational Mechanics, University of Stuttgart, 2013-2014.
Wei Luo:
- Bachelorarbeit (corresponds to Bachelor Thesis).
Create a 3D Simulation Environment with Physical Engine for Verifying Robot Motions.
Institute of Engineering and Computational Mechanics, University of Stuttgart, 2013.
Huiyuan Zhang:
- Bachelorarbeit (corresponds to Bachelor Thesis).
Mechanical Design, Analysis and Simulation of a Wheeled Mobile Robot.
Institute of Engineering and Computational Mechanics, University of Stuttgart, 2013-2014.
Abir Braham:
- Diplomarbeit (corresponds to Master Thesis).
Non-model Based Controls for Mobile Robot Target Searching with Consideration of Obstacle Avoidance.
Institute of Engineering and Computational Mechanics, University of Stuttgart, 2013.
Kaiyu Yu:
- Diplomarbeit.
Swarm Robots Search for Multiple Targets.
Institute of Engineering and Computational Mechanics, University of Stuttgart, 2013.
Rohail Munir:
- Studienarbeit.
Odometry Error Propagation and Correction for One Kind of Omnidirectional Mobile Robots.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2011-2012. Betreuung gemeinsam mit Thomas Kurz.
Ataulmunim Choudhry:
- Studienarbeit.
An External Software PID Controller Design and Tuning for Robotino Mobile Robots.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2011-2012.
Alexander Fröhlich:
- Studienarbeit.
Modeling and Simulation of a Three-Wheeled Omnidirectional Mobile Robot.
Institut für Technische und Numerische Mechanik, Universität Stuttgart, 2011. Betreuung gemeinsam mit Prof. Dr. Haidong Yu.
Patents
schwarz: autorisiert, braun: Überprüfung
Li Jiang, Qirong Tang, Nan Li, Hong Liu:
- One Electrocutaneous for the Prosthetic Hand's Sensory
Feedback. Authorized on June 02, 2010. Authorization No.: ZL
200810064586.2. Announcement No.: CN 101305939B.
Li Jiang, Hong Liu, Dawei Zhao, Jingdong Zhao, Qirong Tang:
- Embedded Control System for Multi-DOF EMG Prosthetic Hand Based on Dual DSP. Authorized on Sept.02, 2009. Authorization No.: ZL 200710144611.3. Announcement No.: CN 100535806C.
Lehre
- Seminars on Applied Mechanics III (WS 2013/2014)
- Seminars on Applied Mechanics II (SS 2013)
- Seminars on Applied Mechanics I (WS 2012/2013)
- Seminars on Applied Mechanics IV (SS 2012)
- Seminars on Applied Mechanics III (WS 2011/2012)
- Seminars on Applied Mechanics II (SS 2011)
- Seminars on Applied Mechanics I (WS 2010/2011)
- Seminars on Applied Mechanics IV (SS 2010)
- Seminars on Applied Mechanics III (WS 2009/2010)
- Seminars on Applied Mechanics II (SS 2009)
- Seminars on Applied Mechanics I (WS 2008/2009)
Sonstige Institutsaufgaben
Besucherzähler
|
|